


 达?矢抾哆拉?
达?矢抾哆拉?
范文一:假设系统开环传递函数零
4-1 假设系统开环传递函数零、极点在S平面上的分布如图所示.试绘制以开环增益为
变量的系统根轨迹的大致图形。
解:(1)
(2)
(3)
(4)
4-2 设已知单位反馈系统的开环传递函数如下,要求绘出当开环增益K1变化时系统
的根轨迹图,并加简要说明。
(1)G(s)=K/s(s+1)(s+3) 1
2 (2)G(s)=K/s(s+4)(s+4s+20) 1
解: (1)
(2)
4-3 设单位反馈系统的开环传递函数为
2 G(s)=K/s(s+2) 1
(1) 试绘制系统根轨迹的大致图形,并对系统的稳定性进行分析。
(2) 若增加一个零点z= -1,试问根轨迹图有何变化,对系统稳定性有何影响,
k1,,Gs,解:(1). ,由于两条根轨迹一直在右半平面,故系统不稳定。 2,,ss,2
(2).根轨迹均位于左半平面,系统稳定。
4-4 设系统的方框图如下图,请绘制以a为变量的根轨迹,并要求:
(1) 求无局部反馈时系统单位斜坡响应的稳态误差、阻尼比及调节时间; (2) 讨论a=2时局部反馈对系统性能的影响。
(3) 确定临近阻尼时的a值。
解: (1)无局部反馈时,即:a=0。阻尼比: ,,0.5
3 调节时间:t,,6 s,wn
,%,0(2)当a=2时,此时系统处于阻尼状态, 3t,,2s,wn即局部反馈消除了阶跃响应的超调量,并缩短了调节时间,使系统响应速度变快。
(3)a=1。
-5 根据下列正反馈回路的开环传递函数,绘出其根轨迹的大致图形: 4
K1GsHs()(), (1) (1)(2)ss,,
K1GsHs()(),(2) sss(1)(2),,
Ks1(2),GsHs()(),(3) ssss(1)(3)(4),,,
解:(1)
(2)
(3)
范文二:系统的开环传递函数为
习 题 4
4-1 系统的开环传递函数为
*K G(s)H(s),(s,1)(s,2)(s,4)
*试证明点K在根轨迹上,并求出相应的根轨迹增益和开环增益。 Ks,,1,j31
4-2 已知开环零、极点如图4-22 所示,试绘制相应的根轨迹。
(a) (b) (c) (d)
(e) (f) (g) (h)
图4-22 开环零、极点分布图 4-3 已知单位反馈系统的开环传递函数,试概略绘出系统根轨迹。 ? KG(s),; s(0.2s,1)(0.5s,1)
*K(s,5)? ; G(s),s(s,2)(s,3)
K(s,1)? G(s),。 s(2s,1)
4-4 已知单位反馈系统的开环传递函数,试概略绘出相应的根轨迹。
*K(s,2)? G(s),(s,1,j2)(s,1,j2)
*K(s,20)? G(s),s(s,10,j10)(s,10,j10)
,K4-5 已知系统的开环传递函数,试概略绘出相应的根轨迹。 ; G(s)H(s),2s(s,8s,20)
? ,K? ;G(s)H(s), s(s,1)(s,2)(s,5)
,K(s,2)? ; G(s)H(s),2s(s,3)(s,2s,2)
,K(s,1)? 。 G(s)H(s),2s(s,1)(s,4s,16)
4-6 设单位反馈系统的开环传递函数,要求:
,K(s,z),(1)确定产生纯虚根为的值和K值; ,j1zG(s),2s(s,10)(s,20)
,K(2)概略绘出的闭环根轨迹图(要求G(s),s(s,1)(s,3.5)(s,3,j2)(s,3,j2)确定根轨迹的渐近线、分离点、与虚轴交点和起始角)。
4-7 已知控制系统的开环传递函数为
,K(s,2) G(s)H(s),22(s,4s,9)试概略绘制系统根轨迹。
4-8 已知系统的开环传递函数为
,K G(s),2s(s,3s,9)试用根轨迹法确定使闭环系统稳定的开环增益K的取值范围。
4-9 单位反馈系统的开环传递函数为
K(2s,1) G(s),42(s,1)(s,1)7试绘制系统根轨迹,并确定使系统稳定的K值范围。
4-10 单位反馈系统的开环传递函数为
,2K(s,2s,5) G(s),(s,2)(s,0.5)试绘制系统的根轨迹,确定使系统稳定的K值范围。
4-11 试绘出下列多项式方程的根轨迹:
32? ; s,2s,3s,Ks,2K,0
32? s,3s,(K,2)s,10K,0
4-12 控制系统的结构如图4-23所示,试概略
绘制其根轨迹。
图4-23 系统结构图 4-13 设单位反馈系统的开环传递函数为
,K(1,s) G(s),s(s,2)
,试绘制系统根轨迹,并求出使系统产生重实根和纯虚根的K值。
4-14 已知单位反馈系统的开环传递函数,试绘制参数b从零变化无穷时的根轨迹,并写出b,2时的系统闭环传递函数。
20(1)G(s),; (s,4)(s,b)
30(s,b)(2)G(s),。 s(s,10)
4-15 已知系统结构图如图4-24所示,试绘制时间常数T变化时系统的根轨迹,并分析参数T的变化对系统动态性能的影响。
4-16 实系数特征方程
32 A(s),s,5s,(6,a)s,a,0要使其根全为实数,试确定参数的范围。 a
4-17 某单位反馈系统结构图如图4-25所示。试分别绘出控制器传递函数为 G(s)c
*? G(s),K1c
*? G(s),K(s,3)2c
*? G(s),K(s,1)3c
*时系统的根轨迹,并讨论比例加微分控制器中,零点的取值对系,zG(s),K(s,z)ccc统稳定性的影响。
4-18 某单位反馈系统的开环传递函数为
K G(s),4(0.5s,1)
试根据系统根轨迹分析系统稳定性,并估算,%,16.3%K时的值。
4-19 单位反馈系统开环传递函数为
,K G(s),2(s,3)(s,2s,2)
,要求闭环系统的最大超调量,%,25%K,调节时间,试选择值。 t,10ss
范文三:系统的开环传递函数为
第四章 作业
1、 系统的开环传递函数为
G (s ) H (s ) =K *
(s +1)(s +2)(s +4) 试证明点s 1=-1+j 3在根轨迹上,并求出相应的根轨迹增益K *和开环增益K 。
2、 已知单位反馈系统的开环传递函数,试概略绘出系统根轨迹。 ⑴ G (s ) =K
s (0. 2s +1)(0. 5s +1)
3、 已知系统的开环传递函数,试概略绘出相应的根轨迹。 ⑶ G (s ) H (s ) =K (s +2)
s (s +3)(s +2s +2) 2*
4、 已知单位反馈系统的开环传递函数,要求:
(1)确定G (s ) =K (s +z )
s (s +10)(s +20) 2*产生纯虚根为±j 1的z 值和K *值;
(2)概略绘出G (s ) =K *
s (s +1)(s +3. 5)(s +3+j 2)(s +3-j 2) 的闭环根轨迹图
(要求确定根轨迹的渐近线、分离点、与虚轴交点和起始角)。
5、 已知系统的开环传递函数为
G (s ) =K
2*s (s +3s +9)
试用根轨迹法确定使闭环系统稳定的开环增益K *值范围。
范文四:17 控制系统的开环传递函数为
17 控制系统的开环传递函数为
要使系统的相角裕度 ,单位斜坡输入时系统的稳态误差 ,试用频率法设计串联滞后-超前校正网络。
18 设I型系统的开环传递函数为
试用希望特性法确定使系统达到下列性能指标的校正装置:
(1)稳态速度误差系统 秒,1;
(2) 超调量 ;
(3) 调节时间 秒。
19 控制系统如习题19图所示。
引入反馈校正 ,试确定校正后系统的相角裕度。
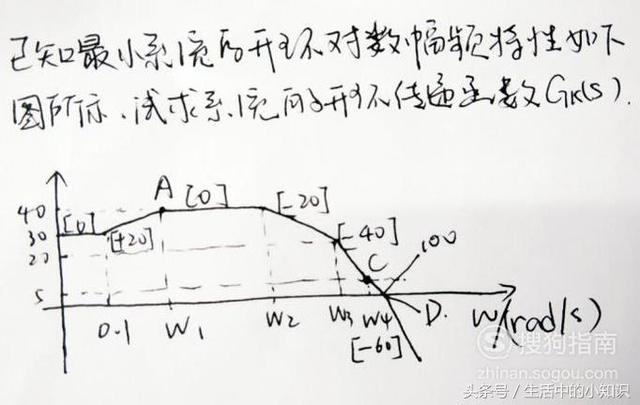
20 最小相位系统校正前、后的开环对数幅频特性如习题20图所示曲线I,II.
(1) 画出串联校正装置的对数幅频特性;
(2) 写出串联校正装置的传递函数。
习题(七)
1 试求a K 的Z变换。
2 已知 。试求X(z)。
3 已知 。试求X(kT)。
4 已知 。试求X(kT)。
5 根据下列G(s)求取相应的脉冲传递函数G(z)。
6 试分析图示离散系统的输出表达式Y(z)。
7 离散系统如图所示(T,1s)。求
1) 当K,8时分析系统的稳定性。
2) 当系统临界稳定时K的取值。
8 系统结构图如图所示,其中K,10, Ts,0.2s,输入函数r(t),1(t),t,0.5t2,求系统的稳态误差。
9 系统结构图如图所示。求当Ts,1s时和Ts,0.5s时,系统的临界K值。
10 离散系统下,图中 ,试确定使系统稳定时,K的取值范围,并确定采样周期Ts对系统稳定性的影响(Ts>0)。
11 系统结构图如图所示,图中 , 。试绘制G1G2(w)的对数频率特性(伯德图),并求出相角稳定裕度等于45度时K的取值。
习题(八)
1 判断下图所对应的系统是否稳定;-1/N(A)与G(jw)的相交点是否为稳定的自持震荡点。
2 非线性系统如图所示。试用描述函数法,确定线性部分的传递函数如下列情况时,系统是否产生自持震荡,若产生自持震荡,求自持震荡的频率及振幅。图中,G(s)有两种情况:
3 非线性系统如图所示。试用描述函数法,分析K=10时,系统的稳定性,并求K的临界值。图中
4 非线性系统如图所示。试确定自震的振幅和频率。图中,
5 非线性系统如图所示。设a=1,b=3用描述函数法分析系统的稳定性,为了使系统稳定,继电器的参数a、b应如何调整。图中,
6 非线性系统如图所示。用描述函数法确定自震荡的频率和振幅。图中,
7 非线性控制系统如图所示。试用描述函数法分析系统的稳定性。图中
范文五:设系统的开环传递函数为
第四章
例4-1 设系统的开环传递函数为
2KG(s)H(s), s(s,1)(s,2)试绘制系统的根轨迹。
解 根据绘制根轨迹的法则,先确定根轨迹上的一些特殊点,然后绘制其根轨迹图。
(1)系统的开环极点为,,是根轨迹各分支的起点。由于系统没有有限开,1,20
环零点,三条根轨迹分支均趋向于无穷远处。
(2)系统的根轨迹有条渐进线 n,m,3
渐进线的倾斜角为
(2K,1)(2K,1),180:,,, ,an,m3,0取式中的K=0,1,2,得φ=π/3,π,5π/3。 a
渐进线与实轴的交点为
nm,,1(0,1,2) ,,p,z,,,1,,,,ajin,m3j,1i,1,,
三条渐近线如图4-13中的虚线所示。
(3)实轴上的根轨迹位于原点与,1点之间以及,2点的左边,如图4-13中的粗实
线所示。
(4)确定分离点
系统的特征方程式为
32 s,3s,2s,2K,0即
132K,,(s,3s,2s) 2
利用,则有 dK/ds,0
dK132,,(s,6s,2),0 ds2
解得
s,,0.423s,,1.577 和 12
由于在,1到,2之间的实轴上没有根轨迹,故s=,1.577显然不是所要求的分离点。2因此,两个极点之间的分离点应为s=,0.423。 1
(5)确定根轨迹与虚轴的交点
方法一 利用劳斯判据确定
劳斯行列表为
3 s 1 2
2 s 3 2 K
6,2K1 0 s3
0 2 sK
由劳斯判据,系统稳定时K的极限值为3。相应于K=3的频率可由辅助方程
22 3s,2K,3s,6,0
确定。
s,,j2解之得根轨迹与虚轴的交点为。根轨迹与虚轴交点处的频率为
,,,2,,1.41
方法二 令代入特征方程式,可得 s,j,
32(j,),3(j,),2(j,),2K,0
即
22(2K,3,),j(2,,,),0
令上述方程中的实部和虚部分别等于零,即
22, 2K,3,,02,,,,0
所以
,,,2 K,3
(6)确定根轨迹各分支上每一点的值 K
根据绘制根轨迹的基本法则,当从开环极点0与,1出发的两条根轨迹分支向右运动时,从另一极点,2出发的根轨迹分支一定向左移动。当前两条根轨迹分支和虚轴在K=3处相交时,可按式
,,(0,j1.41),(0,j1.41),,3 x
求出后一条根轨迹分支上K=3的点为ο=,3。 x
由(4)知,前两条根轨迹分支离开实轴时的相应根值为,0.423?j0。因此,后一条根轨迹分支的相应点为
,,(,0.423),(,0.423),,3 x
所以 ,ο=,2.154。 x
因本系统特征方程式的三个根之和为,2K,利用这一关系,可确定根轨迹各分支上每一点的K值。
现在已知根轨迹的分离点分别为,0.423?j0和,2.154,该点的K值为
2,2K,(,0.423)(,2.154)
即,K=0.195。
系统的根轨迹如图4-1所示。
j ω
S平面
σ
图4-1 例4-1系统的根轨迹
例4-2 设控制系统的开环传递函数为
3K(s,2)G(s)H(s), 2s(s,3)(s,2s,2)
试绘制系统的根轨迹。
解 (1)系统的开环极点为0,,3,(,1,j)和(,1,j),它们是根轨迹上各分支的起点。共有四条根轨迹分支。有一条根轨迹分支终止在有限开环零点,2,其它三条根轨迹分支将趋向于无穷远处。
(2)确定根轨迹的渐近线
渐近线的倾斜角为
(2K,1)(2K,1),180:,,, ,an,m3,0
取式中的K=0,1,2,得φ=π/3,π,5π/3,或?60?及,180?。 a
三条渐近线如图4-14中的虚线所示。
渐近线与实轴的交点为
nm,,1(0,3,1,,1,),(,2)jj ,,,,,,1pz,,,,aji,4,1nm,1,1ji,,
(3)实轴上的根轨迹位于原点与零点,2之间以及极点,3的左边,如图4-14中的粗线所示。从复数极点(,1?j) 出发的两条根轨迹分支沿?60?渐近线趋向无穷远处。
(4)在实轴上无根轨迹的分离点。
(5)确定根轨迹与虚轴的交点
系统的特征方程式为
2s(s,3)(s,2s,2),3K(s,2),0 即
432s,5s,8s,(6,3K)s,6K,0 劳斯行列表
4 1 8 s6K
3 5 s6,3K
40,(6,3K)2 s6K5
150K16,3K, 0 s34,3K
0 6 s
1若阵列中的s行等于零,即(6+3K),150K/(34-3K)=0,系统临界稳定。 解之可得K=2.34。相应于K=2.34的频率由辅助方程
2,,40,(6,3,2.34)s,30,2.34,0 确定。解之得根轨迹与虚轴的交点为s=?j1.614。根轨迹与虚轴交点处的频率为ω=1.614。 (6)确定根轨迹的出射角
根据绘制根轨迹的基本法则,自复数极点p=(,1,j)出发的根轨迹的出射角为 1
,θ,180(2k,1),,(p,2),,p,,(p,3),,(p,1,j) 1111将由图4-14中测得的各向量相角的数值代入并取k=0,则得到 ,,,26.6:系统的根轨迹如图4-14所示。
j ω
j3 S平面
j2
j1
26.6? 135? 45?
0 -4 -3 -2 -1
σ
90?
-j3
图4-2 例4-2系统的根轨迹
-3 已知控制系统的开环传递函数为 例4
K(s,0.125)G(s)H(s), 2s(s,5)(s,20)(s,50)
试绘制系统的根轨迹。
解(1)系统的开环极点为0,0,,5,,20和,50,它们是根轨迹各分支的起点。共有五条根轨迹分支。开环零点为,0.125,有一条根轨迹分支终止于此,其它四条根轨迹分支将趋向于无穷远处。
(2)确定根轨迹的渐近线
渐进线的倾斜角为
(2K,1)(2K,1),180:,,, ,an,m5,1
取式中的K=0,1,2,3得φ=?45?和φ=?135?。 aa
渐近线与实轴的交点为
nm,,1(0,0,5,20,50),(,0.125) ,,p,z,,,18.8,,,,ajin,m4j,1i,1,,
(3)实轴上的根轨迹位于,0.125和,5之间以及,20,与,50之间。
(4)确定根轨迹的分离点和会合点
本例中,系统各零点、极点之间相差很大。例如,零点,0.125与极点之间仅相距0.125,0而零点,0.125与极点,50之间却相差49.875。因此,可作如下简化:在绘制原点附近的轨迹曲线时,略去远离原点的极点的影响;在绘制远离原点的轨迹曲线时,略去零点和一个极点的影响。
(A) 求原点附近的根轨迹和会合点
2略去远离原点的极点,传递的函数可简化为K(s+0.125)/s。零点,0.125左边实轴是根轨迹,并且一定有会合点。原点处有二重极点,其分离角为?90?。确定会合点的位置。此时,系统的特征方程式为
2s,Ks,0.125K,0
2sK,,或 s,0.125
利用,则有 dK/ds,0
2dK2s(s,0.125),s ,,,02ds(s,0.125)
解之可得 s=0.25, 即会合点;s=0,即重极点的分离点。 12
(B) 求远离原点的根轨迹和分离角
略去原点附近的开环偶极子(零点,0.125和极点0),传递函数可简化为
'GH(s),K/s(s,5)(s,20)(s,50) 此时,系统的特征方程式为
s(s,5)(s,20)(s,50),K,0 或表示为
1K,, s(s,5)(s,20)(s,50)
利用,则有 dK/ds,0
32dK4s,225s,2700s,5000 ,,,02ds,,s(s,5)(s,20)(s,50)解之可得s=,2.26 和 s=,40.3。 12
分离点的分离角为?90?。
注意,在零点,0.125和极点,5之间的根轨迹上有一对分离点(,2.26, j0)和(,2.5,
j0))。
(5) 确定根轨迹与虚轴的交点
令代入特征方程式,可得 s,j,
2(,j)(,j,5)(j,,20)(j,,50),K(j,,0.125),0
2整理后有 ,75,,5000,,0
42,,1350,,K,0
4解之得 ,K,8.65,10 ,,,8.16
系统的根轨迹如图4-3所示
j ω S平面
σ
图4-3 例4-3系统的根轨迹
例4-4,设控制系统的结构图如图4-所示
K(s,3)R(C(
s(s,2)
s) s)
图4-4 控制系统的结构图
图 3-10 标准化二阶系统
试证明系统根轨迹的一部分是圆;
解 系统的开环极点为0和,2,开环零点为,3。由根轨迹的幅角条件
m
,(s,z),n,(s,p),(2K,1),,,ij,,11ij
得
,(s,3),,s,,(s,2),(2k,1), s为复数。将s,,,j,代入上式,则有
,,(,,j,3),,(,,j,),,(,,j,,2),(2K,1), 即
,,,,1,1,1tan,tan,180:,tan ,,3,,,2取上述方程两端的正切,并利用下列关系
tanx,tanytan(x,y), 1,tanxtany有
,,,,,,,3,,,,,1,1,3 tantan,tan,,,,2,,,,3,(,3),,,,,,1,,,3,,
,0,,,,,,,1,2 tan180:,tan,,,,,,,2,,2,,1,0,,2,
,,,3, 2,,2,,(,3),,
即
222(,,3),,,(3)
3这是一个圆的方程,圆心位于(,3,j0)处,而半径等于(注意,圆心位于开环传
递函数的零点上)。证毕。
例4-15已知控制系统的开环传递函数为
K(s,1)G(s)H(s), 2s(s,1)(s,4s,16)试绘制系统的根轨迹,并确定系统稳定时K值的范围. 解 (1) 系统的开环极点为0,1和,2?j3.46,开环零点为,1。
(2) 确定根轨迹的渐近线
渐渐线的倾斜角为
(2K,1)(2K,1),180:, ,, ,an,m4,1
取式中的K=0,1,2,得φ=π/3,π,5π/3。 a
渐进线与实轴的交点为
nm,,1(0123.4623.46)(1)2,,,,,,,jj ,,,,,,pz,,,,aji33,nm,1,1ji,,
(3) 实轴上的根轨迹位于1和0之间以及,1与,?之间。
(4) 确定根轨迹的分离点
系统的特征方程式为
2s(s,1)(s,4s,16),K(s,1),0
即
2s(s,1)(s,4s,16)K,, s,1利用,则有 dK/ds,0
432dK3s,10s,21s,24s,16 ,,,02ds(s,1)
解之可得,分离点d=0.46 和 d=,2.22。 12
(5) 确定根轨迹与虚轴的交点
系统的特征方程式为
432s,3s,12s,(K,16)s,K,0
劳斯行列表为
4 1 12 K s
3 s 3 ,16 K
52,K2 K s3
2,K,59K,832150K1 s 0 52,K
0 s K
1若阵列中的s行全等于零,即
2,K,59K,832150K,0 52,K
系统临界稳定。解之可得K=35.7 和 K=23.3。 对应于K值的频率由辅助方程
52,K2 s,K,03
确定。当K=35.7 时 ,s=?j2.56;当K=23.3时 ,s=?j1.56. 根轨迹与虚轴的交点处的频率为ω=?2.56 和ω=?1.56。
(6)确定根轨迹的出射角(自复数极点,2?j3.46出发的出射角) 根据绘制根轨迹基本法则,有
106:,120:,130.5:,90:,,,,(2K,1),180: 因此,开环极点,2?j3.46的出射角为θ=?54.5?。 1,2
系统的根轨迹如图4-17所示。
由图4-17可见,当23.3 <35.7时,系统稳定,否则,系统不稳定。>
S平面
图4-5 例4-5系统的根轨迹
例4-6 已知控制系统如图4-18所示
KR(C(4(0.5s,1)
s) s)
图4-6
图 3-10 标准化(1) 试根据系统的根轨迹分析系统的稳定性。 二阶系统
M%,16.3%(2) 估算时的K值。 p
K16Kg解 G(s),,44(s,2)(s,2)(1)系统有四个开环重极点:p=p=p=p=0。没有零点。实轴上除,2一点外,没1234
有根轨迹段。
根轨迹有四条渐进线,与实轴的交点及夹角分别为
,8 ,,,,2a4
(21)K,,,3, ,,,,,,a444下面证明根轨迹和渐近线是完全重合的。
将根轨迹上任一点s=s代入幅角方程,有 1
4,(s,2),(2K,1), 1
即
1 ,(s,2),(2K,1),14
,和渐近线方位角的表达式比较,两者相等,于是有 a
,(s,2),, 1a由于s的任意性,因此根轨迹和渐近线完全重合。 1
系统的根轨迹如图4-7所示。
图知,随着K的增加,有两条根轨迹将g
与虚轴分别交于j2和,j2处。将s=j2代入幅 j, 值方程有 S平面
Kg ,14|(s,2)|
解得开环根增益:K=64,开环增益:gc
K=K/16=4( cg
即当,,,时,闭环系统有一对虚根?j
,,系统处于临界稳定的状态。当K>4时,
σ 闭环系统将出现一对实部为正的复数根,系统
不稳定。所以,使系统稳定的开环增益范围为
0<><4。>
(2)由超调量的计算公式及指标要求,
有
,,,图4-7 例4-6系统的根轨迹 21,, M%,e,16.3% p
解得,
,,0.5
即,系统闭环极点的阻尼角为
,1,1,,cos,,cos0.5,60:。
在s平面上做等阻尼线OA,使之与负实轴夹角为β=?60?。OA与根轨迹相交于s点,1
容易求得,s=,0.73+j1.27,代入幅值方程,有 1
4 K,|(,0.73,j1.27,2)|,10.41g
K,10.41/16,0.65
注意:本题应用二阶欠阻尼系统的超调量和阻尼比关系式估算四阶系统的性能指标,实
际上是利用了闭环主导极点的概念。不难验证,本系统的闭环极点的分布满足主导极点的分
布要求。可以认为s、s是主导极点,忽略s、s的作用,从而将一个复杂的四阶系统近似1234
为二阶系统,大大简化了问题的处理过程。
例4-7 试用根轨迹法确定下列代数方程的根
432D(s),s,4s,4s,6s,8,0
解 当代数方程的次数较高时,求根比较困难,即使利用试探法,也存在一个选择初始
试探点的问题。用根轨迹法可确定根的分布情况,从而对初始试探点作出合理的选择。
把待求代数方程视为某系统的闭环特征多项式,作等效变换得
2K(s,6s,8)g1,,0 432s,4s,3s
K=1时,即为原代数方程式。等效开环传递函数为 g
K(s,2)(s,4)g G(s)H(s),2s(s,3)(s,1)因为K>0, 先做出常规根轨迹。 g
系统开环有限零点z=,2,z=,4;开环有限极点为 p=p=0,p=,1,p=,3。 121233实轴上的根轨迹区间为[-4,-3],[-2,-1]。
根轨迹有两条渐近线,且σ=1,φ=?90?。 aa
作等效系统的根轨迹如图4-8所示。
图知,待求代数方程根的初始试探点可ω j 在实轴区间[,4,,3]和[,2,,1]内选择。
确定了实根以后,运用长除法可确定其余S平面 根。
初选s=,1.45,检查模值 1
2|s(s,3)(s,1)|111 K,,1.046g|(s,2)(s,4)|11-4 -3 -2 -1 0 σ
由于K>1故应增大s,选s=,1.442,g11
得K=1.003。 g
初选s=,3.08,检查模值得K=1.589,2g 由于K>1,故应增大s,选s=,3.06,得g22图4-8 例4-7系统的根轨迹 K=1.162。经几次试探后,得K=0.991时s=gg2
,3.052。
设 D(s),(s,1.442)(s,3.052),B(s),0运用多项式的长除法得
2B(s),s,0.494,1.819 s,0.257,j1.326解得。解毕。 3,4
例4-8 已知负反馈系统的开环传递函数
Kg G(s)H(s),2s(s,4)(s,4s,20)试概略绘制闭环系统的根轨迹。
解 按照基本法则依次确定根轨迹的参数:
(1)系统无开环有限零点,开环极点有四个,分别为0,,4,和,2?j4。
(2)轴上的根轨迹区间为[,4,0]。
(3)根轨迹的渐近线有四条,与实轴的交点及夹角分别为
σ=,2;φ=?45?,?135? aa
(4)复数开环极点p=,2?j4处,根轨迹的起始角为θ=?90? 3,4p3.4
(5)确定根轨迹的分离点。由分离点方程
1111,,,,0 dd,4d,2,j4d,2,j4
解得
, d,,2d,,2,j612,3
因为
K,64,0 时, d,,2g1
K,100,0时, d,,2,j6g2,3
所以,dd、d皆为闭环系统根轨迹的分离点。 、123
(6)确定根轨迹与虚轴的交点。系统闭环特征方程为
432 D(s),s,8s,36s,80s,K,0g
列写劳斯表如下
4K 1 36 sg
3 8 80 s
2K 26 sg
80,26,8Kg1 s26
0 K sg
当K=260时,劳斯表出现全零行。求解辅助方程 g
2 F(s),26s,K,0g
s,,j10得根轨迹与虚轴的交点为。概略绘制系统根轨迹如图4-21所示。
j ω
S平面
σ 图4-9 例4-8系统的根轨迹
转载请注明出处范文大全网 » 假设系统开环传递函数零

