怀倾
怀倾
当经济变量之间存在函数关系时,弹性被用来表示作为因变量的经济变量的相对变动对作为自变量的经济变量的相对变动的反应程度。
1、弹性的一般公式: 弹性系数 =因变量的相对变动/自变量的相对变动
2、需求弹性包括需求的价格弹性,需求的收入弹性,需求的交叉弹性
2、需求的价格弹性又称需求弹性,指价格变动的比率所引起的需求量变动的比率,即需求量变动对价格变动的反应程度。 需求价格弹性系数=需求量变动百分比/需求价格变动百分比 Ed=-(△Q/Q)/(△P/P)
3、需求弹性的影响因素(1)消费者对商品的需求程度:2)商品的可替代程度(3)商品本身用途的广泛性:(4)商品使用时间的长短:(5)商品在家庭支出中所占的比例
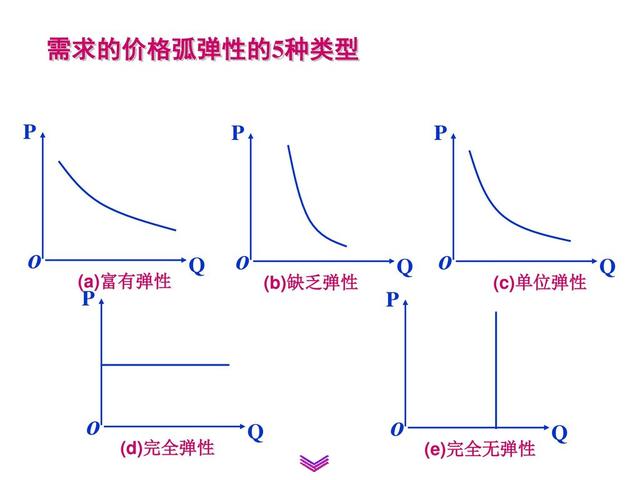
4、需求价格弧弹性的分类(1)需求完全无弹性:E=0。在这种情况下,价格无论怎么变,需求量都不变。需求曲线是一条与横轴垂直的线。如糖尿病人对胰导素的需求。
(2)需求完全弹性:E=∞,当价格为既定时,需求量可以无限增加。在这种情况下,需求曲线平行于横轴。如银行以一固定价格收购黄金。
(3)单位需求弹性(unit-elastic demand):E=1,需求量变动的比率与价格变动的比率相同,无论是价格上升还是下降,销售者的总收益都不变。
(4)需求缺乏弹性(price-inelastic demand):01,需求量变动的比率大于价格变动的比率,如奢侈品等
5、需求收入弹性是指需求量相对收入变化作出的反应程度,即消费者收入增加或减少百分之一所引起对该商品需求量的增加或减少的百分比. 包括正常商品和劣等品
6、需求的交叉弹性是指相关的两种商品中,一种商品需求量相对另一种商品价格变化作出的反应程度,即商品A价格下降或上升百分之一时,引起对商品B需求量的增加或减少的百分比,包括替代品,互补品和无关品
完全弹性碰撞
完全弹性碰撞
完全弹性碰撞
完全弹性碰撞(Perfect Elastic Collision)在理想情况下,完全弹性碰撞的物理过程满足动量守恒和能量守恒。如果两个碰撞小球的质量相等,联立动量守恒和能量守恒方程时可解得:两个小球碰撞后交换速度。如果被碰撞的小球原来静止,则碰撞后该小球具有了与碰撞小球一样大小的速度,而碰撞小球则停止。多个小球碰撞时可以进行类似的分析。事实上,由于小球间的碰撞并非理想的弹性碰撞,还会有能量的损失,所以最后小球还是要停下来。
碰撞,一般是指两个或两个以上物体在运动中相互靠近,或发生接触时,在相对较
完全弹性碰撞
短的时间内发生强烈相互作用的过程。
碰撞会使两个物体或其中的一个物体的运动状态发生明显的变化。
碰撞特点
1)碰撞时间极短
2)碰撞力很大,外力可以忽略不计,系统动量守恒
3)速度要发生有限的改变,位移在碰撞前后可以忽略不计
过程分析
讨论两个球的碰撞过程。碰撞过程可分为两个过程。开始碰撞时,两球相互挤压,发生形变,由形变产生的弹性恢复力使两球的速度发生变化,直到两球的速度变得相等为止。这时形变得到最大。这是碰撞的第一阶段,称为压缩阶段。此后,由于形变仍然存在,弹性恢复力继续作用,使两球速度改变而有
相互脱离接触的趋势,两球压缩逐渐减小,直到两球脱离接触时为止。这是碰撞的第二阶段,称为恢复阶段。整个碰撞过程到此结束。
碰撞分类
根据碰撞过程能量是否守恒分为
1)完全弹性碰撞:碰撞前后系统动能守恒(能完全恢复原状);
2)非弹性碰撞:碰撞前后系统动能不守恒(部分恢复原状);
3)完全非弹性碰撞:碰撞后系统以相同的速度运动(完全不能恢复原状)。
编辑本段例题
完全弹性碰撞妙趣横生、耐人寻味,是很特殊的一类碰撞。现拟从七个方面入手,通过一些经典的实例和身边的现象,仔细"品味"完全弹性碰撞,以期激发学生学习物理的兴趣。
如果主碰球的质量为,被碰球的质量为,根据动量守恒和机械能守恒:
解得。
一、两和相等
(1)结论推导:。【这个结论再没有其它任何条件,适用范围最广。】
(2)典型示例:质量为速度为的小球,与质量为速度为的小球发生正碰,以下各组答案表示完全弹性碰撞的一组是:(A)
A.,
B.,
C.,
D.,。
解析:只要套用结论,便很容易地得到A答案。
点评:这是一个鲜为人知却很有用的结论,可以简单地判断和区别碰撞类型。
二、偷梁换柱
(1)结论推导:若,则,。(交换速度)
完全弹性碰撞
(2)典型示例:如图1所示,在光滑的水平面上有一辆长为的小车A,在A
),A与B的质量相等,B与A的动摩擦因数为。开始时上有一木块B(大小不计
A是静止的,B位于A的正中以初速度向右运动,假设B与A的前后两壁碰撞是完全弹性的,求B与A的前后两个墙壁最多能相碰多少次?
解析:先是B在摩擦力的作用下减速,A在摩擦力的作用下加速。地面是光滑的,系统动量守恒,B与A的前壁发生完全弹性碰撞,且质量相等,因此A与B交换速度。此后,B将加速,A将减速,B又与A的后壁发生完全弹性碰撞交换速度。就这样不停地减速,间断地交换,最终达到相等的速度,相对运动宣告结束。
,解得。
再根据系统的动能定理,解得。
在滑动摩擦力中,是相对路程,所以最多能相碰次。
(3)现象链接:如图2所示,质量相等的两个刚性小球,摆角不相等,同时由静止自由释放,各自将会在自己的半面振动,但是角度不停地周期性变化,对于左面的小球角度的变化是:,右面的小球角度的变化是:。妙趣横生。
三、前赴后继
(1)结论推导:若,且,则,。(传递速度)
(2)一题多变:在图1中,如果B与A之间光滑,B与地面之间的动摩擦因数为,其它条件不变,求B与A的前后两个墙壁最多能相碰多少次?
解析:先是B在A上无摩擦的滑动,与A的前壁发生短暂的完全弹性碰撞,可以看作动量守恒,由于A与B质量相等,所以它们传递速度,B便停下来,A在此速度的基础上开始减速,接着B与A的后壁又发生完全弹性碰撞传递速度,B又匀速运动,A又停止。就这样二者交换,走走停停,最终系统都停下来。
根据系统的动能定理:,解得。
则B与A的前后两个墙壁最多能相碰次。
点评:虽然情景相似,但略作变化,结果就大相径庭。
(3)现象链接:
?(英国皇家学会的一个很著名的实验)它是在天花板上悬挂好多相等摆长的双线摆,当第一个小球摆下以后,这个速度一直就会传递到最后一个小球,最后一个小球也就摆到原来的高度,这样一直往复运动下去,中间的双线摆不运动,起到传递速度的作用。如图3所示。
?(台球)这在台球运动中是经常见到的现象。
(4)经典回顾:(93年全国高考题)如图4所示,A、B是位于水平桌面上的两个质量相等的小木块,离墙壁的距离分别为和,与桌面之间的动摩擦因数分别为和,今给A以某一初速度,使之从桌面的右端向左运动,假定A、B之间,B与墙壁之间的碰撞时间极短,且碰撞中总动能无损失,若要使木块A最后不从桌面上掉下来,则A的初速度最大不能超过多少?
解析:物理情景是这样的,三次碰撞均为完全弹性碰撞:A碰B(前赴后继),B碰墙(蚍蜉撼树),B碰A。三段减速运动:A至B,B往返至A,A减速恰至桌面边缘。
根据质点组的动能定理,
,
解得,。
点评:本题也可以分段列式解答。
四、勇往直前
(1)结论推导:若,且,则,。
(2)典型示例:(验证动量守恒定律的实验)为了避免入射小球被反向弹回,入射小球的质量必须大于被碰小球的质量,原因就在于此。如图5所示。
(3)现象链接:一个大人跑步时一不小心碰到一个小孩的身上,小孩很容易被碰倒,就是这个道理。
(4)习题精练:如图6所示,在光滑水平面上静止着质量为的物体B,B的一端固连着一根轻质弹簧,质量为的物体A,以的速度冲向B并与之发生正碰,求当弹簧重新回复原长时两物体的速度各为几何?
解析:弹簧被压缩到回复原长的过程,是弹性势能储存并完全释放的过程,动能守恒,发生了完全弹性碰撞,"勇往直前",把数据代入篇首的结论,解得:
点评:这个答案可以用第一点"两和相等"的结论验证,。
五、我行我素
(1)结论推导:若,且,则,。
(2)典型示例:(粒子散射实验)在这个实验中,首先得排除粒子大角度散射不是电子造成的,课本上为了说明这一点,用了这样一个比喻:粒子遇到电子就像高速飞行着的子弹遇到一粒尘埃一样。这个现象可以用以上结论很好的解释了。
(3)现象链接:铅球碰撞乒乓球就是这种现象。
(4)习题精练:见第七点"蚍蜉撼树"。
六、反向弹回
(1)结论推导:若,且,则,。
(2)典型示例:有光滑圆弧轨道的小车质量为,静止在光滑水平地面上,圆弧下端水平,有一质量为的小球以水平初速度滚上小车,如图7所示。求小球又滚下和小车分离时二者的速度?
解析:由于满足动量守恒和动能守恒,所以小球在光滑圆弧上的运动,可以看作是完全弹性碰撞,由于,所以小球的分离可以看作是反向弹回。把数据代入篇首的结论,则
小球的速度:,
小车的速度:。
(3)现象链接:(篮球运动)在篮下,质量小的运动员经常被碰回,这是司空见惯的。
(4)习题精练:如图8所示,半径为的光滑圆形轨道固定在竖直面内。小球A、B质量分别为、(为待定系数),A球从左边与圆心等高处由静止开始沿轨道开始下滑,与静止于轨道最低点的B球相碰,碰撞后A、B能达到的最大高度均为,碰撞中无机械能损失,重力加速度为。试求:(1)待定系数;(2)第一次碰撞刚刚结束时小球A、B各自的速度。
解析:(1)由于圆环内侧光滑,又碰撞是完全弹性碰撞,所以系统机械能守恒,
,得。
(2)小球A滚下,在最低点的动能是:,解得;
接着与B球发生完全弹性碰撞,被反向弹回,把数据代入篇首的结论,则第一次碰撞刚刚结束时小球A的速度为:,
小球B的速度为:。
点评:
?本题也可以倒过来计算,碰撞之后A、B分别向两侧滑上圆环,机械能守恒
A.;B.。
?在反向弹回的情况下,如果,碰撞之后二者速率相等。
七、蚍蜉撼树
(1)结论推导:若,且,则,。
(2)典型示例:(乒乓球碰撞墙壁)乒乓球碰倒墙壁以后被反向弹回,它的动量发生了二倍的改变,即。如图9所示。
(3)现象链接:(气体分子碰撞器壁)气体分子频繁地碰撞器壁,给器壁产生一个持续的恒定的压力。而每个分子都被反向弹回。
(4)习题精练:网球拍以速率击中以速率飞来的网球,被击回的网球的最大速率是多少?(以上所有的速率都是指相对于地面的速率)
解析:最大速率是发生在一条直线上的完全弹性碰撞,设球拍质量为,网球质量为,满足。
解法一:若球拍静止,根据以上第七点"蚍蜉撼树"的结论,网球被反向弹回,速率不变。若网球静止,根据以上第五点"我行我素"的结论,网球将以的速率飞出。
综合以上两点,被击回的网球的最大速率为:。
解法二:若以球拍为参照系,则网球相对于球拍的速率为,碰撞后以相对速率反向弹回。
再以地面为参照系,球拍相对于地面的速率为,与网球相对于球拍离去速度同向,所以网球对地的速度是:。
解法三:球拍击球前后速度几乎不变,即保持不变,根据第一点"两和相等"得,因此。
总之,从方方面面"品味"完全弹性碰撞,对掌握其它类型的碰撞是大有裨益的。
完全弹性碰撞
第6讲 守恒定律——综合应用
精编资料
简介:如两物体在碰撞后以同一速度运动(即它们相碰后不再分开),这种碰撞叫做完全非弹性碰撞.解题要点:动量守恒.碰撞后系统以相同的速度运动... 关键词:完全
?3,7 完全弹性碰撞 完全非弹性碰撞
一、碰撞(Collision)
1(基本概念:
碰撞,一般是指两个或两个以上物体在运动中相
互靠近,或发生接触时,在相对较短的时间内发生强
烈相互作用的过程。
碰撞会使两个物体或其中的一个物体的运动状态
发生明显的变化。
碰撞过程一般都非常复杂,难于对过程进行仔细
分析。但由于我们通常只需要了解物体在碰撞前后运动状态的变化,而对发生碰撞的物体系来说,外力的作用又往往可以忽略,因而可以利用动量、角动量以及能量守恒定律对有关问题求解。
2(特点:
1)碰撞时间极短
2)碰撞力很大,外力可以忽略不计,系统动量守恒
3)速度要发生有限的改变,位移在碰撞前后可以忽略不计
3(碰撞过程的分析:
讨论两个球的碰撞过程。碰撞过程可分为两个过程。开始碰撞时,两球相互挤压,发生形变,由形变产生的弹性恢复力使两球的速度发生变化,直到两球的速度变得相等为止。这时形变得到最大。这是碰撞的第一阶段,称为压缩阶段。此后,由于形变仍然存在,弹性恢复力继续作用,使两球速度改变而有相互脱离接触的趋势,两球压缩逐渐减小,直到两球脱离接触时为止。这是碰撞的第二阶段,称为恢复阶段。整个碰撞过程到此结束。
4(分类:根据碰撞过程能量是否守恒
1)完全弹性碰撞:碰撞前后系统动能守恒(能完全恢复原状); 2)非弹性碰撞:碰撞前后系统动能不守恒(部分恢复原状); 3)完全非弹性碰撞:碰撞后系统以相同的速度运动(完全不能恢复原状)。
二、完全弹性碰撞(Perfect Elastic Collision)
在碰撞后,两物体的动能之和(即
总动能)完全没有损失,这种碰撞叫做
完全弹性碰撞。
解题要点:动量、动能守恒。 问题:两球m,m对心碰撞,碰撞前12,,,,v,v速度分别为,碰撞后速度变为 v,v102012
动量守恒
1
第6讲 守恒定律——综合应用
(1) mv,mv,mv,mv1122110220
11112222动能守恒 (2) mv,mv,mv,mv11221102202222
由(1) ,,,, (3) mv,v,mv,v11102202
2222由(2) (4) ,,,,mv,v,mv,v11102202
由(4)/(3) v,v,v,v110220
或 (5) v,v,v,v102021
即碰撞前两球相互趋近的相对速度v-v等于碰撞后两球相互分开的相对速度1020
v-v。由(3)、(5)式可以解出: 21
,,m,mv,2mv1210220v,1m,m12 ,,m,mv,2mv2120110v,2m,m12
讨论:
, ,则v,v,v,v,两球碰撞时交换速度 m,m21012012
, v,0,则v,,v,,反弹,即质量很大且原来m,,mv,0m201101221
静止的物体,在碰撞后仍保持不动,质量小的物体碰撞后速度等值反向。 , 若m<>
的与质量很小的球体相碰时,它的速度不发生显著的改变,但是质量很小
的球却以近似于两倍于大球体的速度运动。
三、完全非弹性碰撞(Perfect Inelastic Collision)
如两物体在碰撞后以同一速度运动(即它们相碰后不再分开),这种碰撞叫做完全非弹性碰撞。
解题要点:动量守恒。
碰撞后系统以相同的速度运动 v,v,v12
,,mv,mv,m,mv动量守恒 11022012
mv,mv110220所以 v,m,m12
动能损失为
mm111,,222211 ,E,mv,mv,m,mv,v,v,,,,,,110220121020,,2222m,m,,12
四、非完全弹性碰撞
两物体碰撞时,由于非保守力作用,致使机械能转换为热能、声能、化学能等其他形式的能量,或者其他形式的能量转换为机械能,这种碰撞就叫做非弹性碰撞。
解题要点:动量守恒、能量守恒。
由于压缩后的物体不能完全恢复原状而有部分形变被保留下来,因此系统的动量守恒而动能不守恒。
实验表明,压缩后的恢复程度取决于碰撞物体的材料。牛顿总结实验结果,提出碰撞定律:碰撞后两球的分离速度v -v与碰撞前两球的接近速度v-v211020
2
第6讲 守恒定律——综合应用
之比为以定值,比值由两球材料的性质决定。该比值称为恢复系数(Coefficient of Restitution),用e表示,即
v,v21 e,v,v1020
由上式可见:e=0,v=v,为完全非弹性碰撞; 21
e=1,v=v= v-v,为完全弹性碰撞; 211020
0<><1,为非完全弹性碰撞。>
,,m,emv,(1,e)mv1210220v,1m,m12 ,,m,emv,(1,e)mv2120110v,2m,m12
例题:如图所示,质量为1kg的钢球,系在长为l=0.8m的绳子的一端,绳子的另一端固定。把绳子拉至水平位置后将球由静止释
放,球在最低点与质量为5kg的钢块作完全弹性碰
撞。求碰撞后钢球升高的高度。
解:本题分三个过程:
第一过程:钢球下落到最低点。以钢球和地球为系
统,机械能守恒。以钢球在最低点为重力势能零点。
12 (1) mv,mgl02
第二过程:钢球与钢块作完全弹性碰撞,以钢球和钢块为系统,动能和动量守恒。
111222 mv,mv,MV (2) 0222
mv,mv,MV (3) 0
第三过程:钢球上升。以钢球和地球为系统,机械能守恒。以钢球在最低点为重力势能零点。
12 (4) mv,mgh2
由(2)、(3)可得
222 (5) ,,mv,v,MV0
,,mv,v,MV (6) 0
v,v,V(6)/(5),得 0
,,mv,mv,Mv,v代入(2) 00
m,M,,v,v因而 (7) ,,0m,M,,
(4)/(1),得
2vh (8) ,2lv0
3
第6讲 守恒定律——综合应用
2m,M,,(7)代入(8) h,l,,m,M,,
21,5,,代入数据,得 h,,0.8,0.356m,,1,5,,
4
第6讲 守恒定律——综合应用
?3,8 能量守恒定律
一、内容:
如果系统内除了万有引力、弹性力等保守力作功以外,还有摩擦力或其他非保守内力作功,那么这系统的机械能就要发生变化,但它总是转换为其他形式的能量,这是由大量的实验所证明的。
对于一个孤立系统来说,系统内各种形式的能量是可以相互转换的,但是不论如何转换,能量既不能产生,也不能消灭,能量的总和是不变的。这就是能量守恒定律。
该定律是自然界的基本定律之一,是物理学中最具普遍性的定律之一,可适用于任何变化过程,不论是机械的、热的、电磁的、原子和原子核内的,以及化学的、生物的等等,其意义远远超出了机械能守恒定律的范围,后者只不过是前者的一个特例。
二、说明:
1(能量守恒定律是19世纪,经过J.M.Meyer,D.Joule和H.Von Helmholtz等人
的努力建立起来的。Engels把能量守恒定律同生物进化论、细胞的发现相提
并论,誉为19世纪的三个最伟大的科学发现。
2(因为能量是各种运动的一般量度,所以能量守恒定律所阐明的实质就是各种
物质的运动可以相互转换。
三、能量守恒定律的重要性:
, 自然界一切已经实现的过程无一例外遵守能量守恒定律。 , 凡是违反能量守恒定律的过程都是不可能实现的,例如“永动机”只能以
失败而告终。
, 利用能量守恒定律研究物体系统,可以不管系统内各物体的相互作用如何
复杂,也可以不问过程的细节如何,而直截了当地对系统的始末状态的某
些特征下结论,为解决问题另辟新路子。这也是守恒定律的特点和优点。
四、 守恒定律的意义
自然界中许多物理量,如动量、角动量、机械能、电荷、质量、宇称、粒子反应中的重子数、轻子数等等,都具有相应的守恒定律。
物理学特别注意守恒量和守恒定律的研究,这是因为:
第一,从方法论上看:利用守恒定律可避开过程细节而对系统始、末态下结论(特点、优点)。 第二,从适用性来看:守恒定律适用范围广,宏观、微观、高速、低速均适用(牛顿定律只适用于宏观、低速,但由它导出的动量守恒定律的适用范围远它广泛,迄今为止没发现它不对过)。
第三,从认识世界来看:守恒定律是认识世界的有力武器。在新现象研究中,当发现某个守恒定律不成立时,往往作以下考虑:
(1)寻找被忽略的因素,从而恢复守恒定律的应用。
(2)引入新概念,使守恒定律更普遍化。
(3)无法“ 补救”时,宣布该守恒定律失效。
例:中微子的发现
问题的提出:β衰变:核A ? 核B + e
如果核A静止,则由动量守恒应有 P +P = 0 ;但β衰变云室照片表明, B、e的径迹并Be
不在一条直线上。
问题何在? 是动量守恒有问题?还是有其它未知粒子参与?
5
第6讲 守恒定律——综合应用
物理学家坚信动量守恒。
, 1930年泡利(W.Pauli)提出中微子假说,以解释β衰变各种现象。
, 1956年(26年后)终于在实验上直接找到中微子。
、μ子中微子ν , 1962实验上正式确定有两种中微子:电子中微子ν、μe
第四,从本质上看:
守恒定律揭示了自然界普遍的属性?对称性。每一个守恒定律都相应于一种对称性(变换不变性):
动量守恒 相应于 空间平移的对称性
能量守恒 相应于 时间平移的对称性
角动量守恒 相应于 空间转动的对称性
*功与能量的联系和区别
能量守恒定律能使我们更深刻地理解功的意义。
按能量守恒定律,一个物体或系统的能量变化时,必然有另一个物体或系统的能量同时发生变化。所以当我们用作功的方法(以及用传递热量等其他方法)使一个系统的能量变化时,在本质上是这个系统与另一个系统之间发生了能量的交换。而这个能量的交换在量值上就用功来描述。所以说,
(1)功总是和能量的变化与转换过程相联系。
(2)功是能量交换或变化的一种量度。
(3)能量是代表物体系统在一定状态下所具有的作功本领,它和物体系统的状态有关,是系统状态的函数。
6
第6讲 守恒定律——综合应用
*?3,9 质心 质心运动定律
内容:1(质心的概念;2(质心运动定律。
一、质心(Center of Mass)的概念
1(例子:水平上抛三角板;运动员跳水 2(质心——代表质点系质量分布的平均位置,质心可以代表质点系的平动。
i3(推导:N个质点组成的质点系,第个质,点的质量为m,位置矢量为,所受的合rii,,,,
力为,其中为系统内各质F,f,ffiii外i,点对它作用的内力,为系统外质点对它fi外
作用的外力。根据牛顿第二定律得 ,2,,,dri m,F,f,fiiii外2dt
对整个质点系中的所有质点求和 ,2,dri Fm ,,,ii2dt
由于质点系内各质点之间的相互作用
满足牛顿第三定律,这些相互作用力的和为,,,,,f,0零(),所以等于质点系所受的合外力,即,而 FF,FF,i,,iicc,,222mr,,drdd,,iiim,,,mr,m ,,,iiii222mdtdtdt,i因而可引入质心
n,mr,ii,i,1,r cn
m,ii,1 在直角坐标系中,质心位置矢量各分量的表达式为:
nnn
mxmymz,,,iiiiiii,1i,1i,1,,,xyz ,, cccnnn
mmm,,,iiii,1i,1i,1对于连续分布的物体,质心的计算公式为:
1,, r,rdmc,M
分量形式为
111,, x,xdmy,ydmz,zdmccc,,,MMM
7
第6讲 守恒定律——综合应用
例题:试计算如图所示的面密度为恒量的直角三角形的质心的位置。 解:取如图所示的坐标系。由于质量面密度为恒量,取微元的质ds,dxdy,
量为 dm,, ds,, dxdy
所以质心的x坐标为
,xdxdy,, x, c, dxdy,,
a 从图中可以看出,三角形斜边的方程为 y,a,xb
a,axbb2ab,xxy dd,,,b006x,,,积分得 caab,ax3bb,2xy dd,,,00
, ddyxy,,y,同样可以求得质心的y坐标 c, ddxy,,
aa,xbb2ab,y dxdy,,,a006y,,,积分 caab,ax3bb,2 dxdy,,,00
ba,,,因而质心的坐标为 ,,33,,
说明:
1)坐标系的选择不同,质心的坐标也不同;
2)对于密度均匀,形状对称的物体,其质心在物体的几何中心处; 3)质心不一定在物体上,例如圆环的质心在圆环的轴心上; 4)质心和重心(Center of Gravity)是两个不同的概念
质心是有由质量分布决定的特殊的点;重心是地球对物体各部分引力的合力的作用点。当物体远离地球时,重力不存在,重心的概念失去意义,但是质心还是存在的。
二、质心运动定律(Theorem of Motion of Center-of-Mass) 1(系统的动量
把质心公式对时间求导 ,,ddrrciM,m ,iddtt,,drdr,,ciivv为质心的速度,为第个质点的速度为,因而上式为 cidtdt,,,Mv,mv,p ,,ciii
8
第6讲 守恒定律——综合应用
即,系统内各质点的动量的矢量和等于系统质心的速度与系统质量的乘积。 2(质心运动定理
引入系统动量以后,系统所受的合外力可以写成 ,,dv,c F,M,Maccdt
即,作用在系统上的合外力等于系统的总质量与系统质心加速度的乘积。
它与牛顿第二定律在形式上完全相同,相对于系统的质量全部集中于系统,的质心,在合外力的作用下,质心以加速度运动。 ac
说明:无论系统内各质点的运动任何复杂,但是质心的运动可能相当简单,只由作用在系统上的外力决定;内力不能改变质心的运动状态。大力士不能自举其身就是一例。质心是质点系平动的代表点,各质点追随质心的运动,表现出系统的整体运动。
3(克尼希(Konig Theorem)定理
质点系的总动能,等于相对于质点系的动能,加上随质点系整体平动的动能,即
12, E,E,mvkkc2
例题:设有一个质量为2m的弹丸,从地面
斜抛出去,它飞行到最高点处爆炸成质量相
等的两个碎片。其中一个碎片竖直自由下落,
另一个碎片水平抛出,它们同时落地。试问
第二各碎片落地点在何处, 解:考虑弹丸为一系统,空气阻力略去不计。
爆炸前后弹丸的质心的运动轨迹都在同一抛物线上。如取第一个碎片的落地点为坐标原点,水平向右为坐标轴的正方向,设m和m为两个碎片的质量,且12
m= m=m;x和x为两个碎片落地点距原点的距离,x为弹丸质心距坐标原点1212c
的距离。有假设可知x=0,于是 1
mx,mx1122 x,Cm,m12
由于x=0,m= m=m,由上式可得 112
x=x 1c
即第二各碎片的落地点的水平距离为碎片质心与第一个碎片水平距离的两倍。
9
第6讲 守恒定律——综合应用
10
完全弹性碰撞matlab
Matlab 设计实验 课题名称:完全弹性碰撞 课题名称:完全弹性碰撞
一. 设计背景:
完全弹性碰撞(Perfect Collision) 完全弹性碰撞(Perfect Elastic Collision): 在理想情况下,完全弹 性碰撞的物理过程满足动量守恒和能量守恒。如果两个碰撞小球的质量相 等,联立动量守恒和能量守恒方程时可解得:两个小球碰撞后交换速度。 如果被碰撞的小球原来静止,则碰撞后该小球具有了与碰撞小球一样大小 的速度,而碰撞小球则停止。多个小球碰撞时可以进行类似的分析。
二. 设计意义
真实情况下,由于小球间的碰撞并非理想的弹性碰撞,还会有能量的损失, 真实情况下,由于小球间的碰撞并非理想的弹性碰撞,还会有能量的损失, 所以最后小球还是要停下来。 所以该设计主要用于研究能量守恒中的某些问题。还有就是用于实验演示。
三. 程序设计
该程序主要设置了三个不同颜色的小球,在真空环境下(理想环境下)的 碰撞实验演示。 碰撞实验演示。 该程序可以通过改变各种参数,研究各种情况下的实验数据。 该程序可以通过改变各种参数,研究各种情况下的实验数据。 研究各种情况下的实验
程序: pole=1.8;%定义摆线的长度 定义摆线的长度
xmax=2;%定义横坐标长度 定义横坐标长度 ymax=2;%定义纵坐标长度 定义纵坐标长度 basew=2.3;%定义图中方框的宽度 定义图中方框的宽度 baseh=2.3;%定义图中方框的高度 定义图中方框的高度 instant=0.2;%定义摆线间距 定义摆线间距 %三视图的初始设置 三视图的初始设置 %第一幅图 第一幅图 figure('name','理想情况下能量守恒定律 理想情况下能量守恒定律 1','position',[500,340,440,320]);%定义第一幅图的标题和位置 定义第一幅图的标题和位置 fill([xmax,xmax,-xmax,-xmax,xmax,xmax-0.05,xmax-0.05,xmax+0.05,-xmax+0.05,xmax-0.05],[ymax,-ymax,ymax,ymax,ymax,ymax-0.05,-ymax+0.05,-ymax+0.05,ymax0.05,ymax-0.05],[0,1,1]); %填充底座背景 填充底座背景 hold on;%保持当前图形及坐标所有特性 保持当前图形及坐标所有特性 fill([xmax-0.05,xmax-0.05,-xmax+0.05,-xmax+0.05],[ymax0.5 ,ymax-0.55,ymax-0.55,ymax-0.5],'g');%填充方框内横杆背景 填充方框内横杆背景 hold on;%保持当前图形及坐标所有特性 保持当前图形及坐标所有特性 text(-0.25,1.7,'1');text(0,1.7,'2');text(0.25,1.7,'3');%在坐标处标识 在坐标处标识 说明文字 text( -1.0,1.7,'a');text( -1.0,-1.7,'b');%在坐标处标识说明文字 在坐标处标识说明文字 在坐 text(1.0,1.7,'真空容器 真空容器');text(-1.8,1.7,'主视图 主视图');%在坐标处标识说明文 真空容器 主视图 在坐标处标识说明文 字 axis([-basew,basew,-baseh,baseh]);%定义背景坐标范围在 x(-2.3~2.3) 定义背景坐标范围在 Y(-2.3~2.3)
之间 之间 %axis('off');%覆盖坐标刻度并填充背景 覆盖坐标刻度并填充背景
theta0=7 *pi/6;%摆线 1 的初始角度 摆线 x0=pole*cos(theta0);%摆线 1 末端 x 坐标 摆线 y0=pole*sin(theta0)+1.5;%摆线 1 末端 y 坐标 摆线 body1=line([-instant,x0-instant],[1.5,y0],'color','r','linestyle','','erasemode','xor');%设置摆线 1 设置摆线 head1=line(x0instant,y0,'color','r','linestyle','.','erasemode','xor','markersize',40);% 设置第一个小球颜色,大小 theta1=3*pi/2;%摆线 2,3 的角度 摆线 x1=pole*cos(theta1);%摆线 2,3 末端 x 坐标 摆线 y1=pole*sin(theta1)+1.5;%摆线 2,3 末端 y 坐标 摆线 body=line([-0.001,x1],[1.5,y1],'color','k','linestyle','','erasemode','xor');%设置摆线 2 设置摆线 head=line(x1,y1,'color','k','linestyle','.','erasemode','xor','markersize ',40);%设置第 2 个小球颜色,大小 设置第 body2=line([instant;x1+instant],[1.5;y1],'color','b','linestyle','','erasemode','xor');%设置摆线 3 设置摆线 head2=line(x1+instant,y1,'color','b','linestyle','.','erasemode','xor',' markersize',40);%设置第 3 个小球颜色,大小 设置第 theta3=15*pi/6 ; %第二幅图 第二幅图 figure('name','理想情况下能量守恒定律 2','position',[500,40,440,320]);% 理想情况下能量守恒定律 定义第一幅图的标题和位置 fill([xmax,xmax,-xmax,-xmax,xmax,xmax-0.05,xmax-0.05,xmax+0.05,-xmax+0.05,xmax-0.05],[ymax,-ymax,ymax,ymax,ymax,ymax-0.05,-ymax+0.05,-ymax+0.05,ymax0.05,ymax-0.05],[0,1,1]); %填充底座背景 填充底座背景
hold on;%保持当前图形及坐标所有特性 保持当前图形及坐标所有特性 fill([xmax-0.05,xmax-0.05,-xmax+0.05,-xmax+0.05],[ymax0.5 ,ymax-0.55,ymax-0.55,ymax-0.5],'g');%填充方框内第一根横杆背景 填充方框内第一根横杆背景 hold on;%保持当前图形及坐标所有特性 保持当前图形及坐标所有特性 fill([xmax-0.05,xmax-0.05,-xmax+0.05,-xmax+0.05],[ymax+0.55 ,-ymax+0.5,-ymax+0.5,-ymax+0.55 ],'b');%填充方框内第 填充方框内第 二根横杆背景 hold on;%保持当前图形及坐标所有特性 保持当前图形及坐标所有特性 保持当前图 text(-0.25,1.7,'1');text(0,1.7,'2');text(0.25,1.7,'3');%在坐标处标识 在坐标处标识 说明文字 text( -1.0,1.7,'a');text( -1.0,-1.7,'b');%在坐标处标识说明文字 在坐标处标识说明文字 text(1.0,1.7,'真空容器 真空容器');text(-1.8,1.7,'俯视图 俯视图');%在坐标处标识说明文 真空容器 俯视图 在坐标处标识说明文 字 axis([-basew,basew,-baseh,baseh]);%定义背景坐标范围在 x(-2.3~2.3) 定义背景坐标范围在 Y(-2.3~2.3)之间 之间 %axis('off');%覆盖坐标刻度并填充背景 覆盖坐标刻度并填充背景 y01=0;%设置摆球纵坐标值 设置摆球纵坐标值 body11=line([-instant,x0-instant],[1.5,y01],'color','r','linestyle','','erasemode','xor');%设置摆线 1 上摆线 设置摆线 body12=line([-instant,x0-instant],[-1.5,y01],'color','r','linesty
le','','erasemode','xor');%设置摆线 1 下摆线 设置摆线 下摆线 head01=line(x0instant,y01,'color','r','linestyle','.','erasemode','xor','markersize',40);% 设置第一个小球颜色,大小 body01=line([-0.001,x1],[1.5,y01],'color','k','linestyle','','erasemode','xor');%设置摆线 2 上摆线 设置摆线 body02=line([-0.001,x1],[-1.5,y01],'color','k','linestyle','','erasemode','xor');%设置摆线 2 下摆线 设置摆线
head00=line(x1,y01,'color','k','linestyle','.','erasemode','xor','marker size',40);%设置第二个小球颜色,大小 设置第二个小球颜色,大小 body21=line([instant;x1+instant],[1.5;y01],'color','b','linestyle','','erasemode','xor');%设置摆线 3 上摆线 设置摆线 body22=line([instant;x1+instant],[-1.5;y01],'color','b','linestyle','','erasemode','xor');%设置摆线 3 下摆线 设置摆线 head02=line(x1+instant,y01,'color','b','linestyle','.','erasemode','xor ','markersize',40);%设置第三个小球颜色,大小 设置第三个小球颜色,大小 %第三幅图 第三幅图 figure('name','理想情况下能量守恒定律 3','position',[50,340,440,320]);% 理想情况下能量守恒定律 定义第三幅图的标题和位置 fill([xmax,xmax,-xmax,-xmax,xmax,xmax-0.05,xmax-0.05,xmax+0.05,-xmax+0.05,xmax-0.05],[ymax,-ymax,ymax,ymax,ymax,ymax-0.05,-ymax+0.05,-ymax+0.05,ymax0.05,ymax-0.05],[0,1,1]); %填充底座背景 填充底座背景 hold on%保持当前图形及坐标所有特性 保持当前图形及坐标所有特性 text(1.0,1.7,'真空容器 真空容器');text(-1.8,1.7,'侧视图 侧视图');%在坐标处标识说明文 真空容器 侧视图 在坐标处标识说明文 字 text( -1.7,1.5,'a');text( 1.7,1.5,'b');%在坐标处标识说明文字 在坐标处标识说明文字 axis([-basew,basew,-baseh,baseh]);%定义背景坐标范围在 x(-2.3~2.3) 定义背景坐标范围在 Y(-2.3~2.3)之间 之间 %axis('off');%覆盖坐标刻度并填充背景 覆盖坐标刻度并填充背景 x01=0;x02=1.48;y02=1.48;%设置坐标 设置坐标 head000=line(x02,y02,'color','g','linestyle','.','erasemode','xor','markersize',18);% 设置横杆 a head000=line(x02,y02,'color','g','linestyle','.','erasemode','xor','mar kersize',18);%设置横杆 b 设置横杆
body311=line([-x02,x01],[y02,y0],'color','r','linestyle','','erasemode','xor');%设置摆线 1 上摆线 设置摆线 body312=line([x02,x01],[y02,y0],'color','r','linestyle','','erasemode','xor');%设置摆线 1 下摆线 设置摆线 head301=line(x01,y0,'color','r','linestyle','.','erasemode','xor','marke rsize',40);%设置摆球 1 设置摆球 body301=line([-x02,x01],[y02,y1],'color','k','linestyle','','erasemode','xor');%设置摆线 2 上摆线 设置摆线 body302=line([x02,x01],[y02,y1],'color','k','linestyle','','erasemode','xor');%设置摆线 2 下摆线 设置摆线 head300=line(x01,y1,'color','k','linestyle','.','erasemode','xor','mark ersize',40);%设置摆球 2 设置摆球 body321=line([-x02;x01],[y02;y1],'color','b','linestyl
e','','erasemode','xor');%设置摆线 3 上摆线 设置摆线 body322=line([x02;x01],[y02;y1],'color','b','linestyle','','erasemode','xor');%设置摆线 3 下摆线 设置摆线 head302=line(x01,y1,'color','b','linestyle','.','erasemode','xor','mark ersize',40);%设置摆球 3 设置摆球 while 1%条件判断 条件判断 theta0=theta0+pi/540; theta3=theta3-pi/540; if theta0>=15*pi/6 theta0=7*pi/6; theta3=15*pi/6 ;
%设置摆球 1 运动过程 设置摆球 elseif (theta0>=7*pi/6)&(theta0
set(body1,'xdata',[-instant,x11-instant],'ydata',[1.5,y11]);%设 设 置主视图中摆线 1 运动 set(head1,'xdata',x11-instant,'ydata',y11);%设置主视图中摆球 1 设置主视图中摆球 运动 set(body11,'xdata',[-instant,x11-instant],'ydata',[1.5,y01]);% 设置俯视图中摆线 设置俯视图中摆线 1 上摆线运动 set(body12,'xdata',[-instant,x11-instant],'ydata',[1.5,y01]);% 设置俯视图中摆线 1 下摆线运动 set(head01,'xdata',x11-instant,'ydata',y01);%设置俯视图中摆球 设置俯视图中摆球 1 运动 set(body311,'xdata',[-x02,x01],'ydata',[y02,y11]);%设置侧视图 设置侧视图 中摆线 1 上摆线运动 set(body312,'xdata',[x02,x01],'ydata',[y02,y11]);%设置侧视图 设置侧视图 中摆线 1 下摆线运动 set(head301,'xdata',x01,'ydata',y11);%设置侧视图中摆球 1 运动 设置侧视图中摆球
%设置摆球 3 运动的过程 设置摆球 elseif (theta0>=3*pi/2)&(theta0
set(head02,'xdata',x22+instant,'ydata',y01);%设置俯视图中摆 设置俯视图中摆 球 3 运动 set(body321,'xdata',[-x02,x01],'ydata',[y02,y22]); %设置侧视 设置侧视 图中摆线 3 上摆线运动 set(body322,'xdata',[x02,x01],'ydata',[y02,y22]);%设置侧视图 设置侧视图 中摆线 3 下摆线运动 set(head302,'xdata',x01,'ydata',y22);%设置侧视图中摆球 3 运动 设置侧视图中摆球
% 设置摆球 3 运动过程 elseif (theta0>=11*pi/6 )&(theta0
图 设置俯视图 中摆球 3 运动 set(body321,'xdata',[-x02,x01],'ydata',[y02,y32]); %设置 设置 侧视图中摆线 3 上摆线运动 set(body322,'xdata',[x02,x01],'ydata',[y02,y32]);%设置侧 设置侧 视图中摆线 3 下摆线运动
set(head302,'xdata',x01,'ydata',y32);%设置侧视图中摆球 3 设置侧视图中摆球 运动
%设置摆球 1 运动过程 设置摆球 elseif (theta0>=13*pi/6 )&(theta0
四. 程序截图
主视图
俯视图
侧视图
完全弹性碰撞
1.斜面和水平面都是光滑的,质量为m的球,由高为h处静止滑下,与质量为M的静止的
h球发生弹性正碰,碰后m球回到高处。求m与M的比值, 2
12mgh,mv,002
mv,m(,v),Mv012m
111222 mv,mv,Mv012222
12h ,mgh,0,mv1M 2
m:M,1:(3,22)
2.如图,悬挂质量为m的B球的绳最大张力达到5mg时就要拉断,B球静止,将A球拉到悬线水平,然后无初速度释放。问AB两球的质量比为多大时,B球的悬线要断,(AB两球的球心到悬点的长度相等,其碰撞为完全弹性碰撞)
12mgl,Mv,002A Mv,Mv,mv012
111222 Mv,Mv,mv012222
2v25mg,mg,ml
B A M:m,(2,1):1
3.小球AB质量相等,均可视为质点,小球A和B发生弹性碰撞后,小球B沿光滑的半径为R的竖直圆轨道的最低点向上运动。若小球B沿圆轨道运动时恰能通过最高点。求夹角。 ,
,12 (1cos)0mgl,,mv,02
mv,mv,mv012
111222mv,mv,mv012222
2 R v3mg,mR
1122,mg2R,mv,mv32A 22B 5R,arccos(1),,2l
1v,3ms4.小球A从半径R=0.8m的光滑圆弧顶端以初速度滑下,到达光滑水平面上和04
原来静止的小球B发生弹性正碰后,小球A恰能回到原位置(圆弧顶端)。求AB两球质量
之比?
112mgR,mv,mv022
v,5(ms)A
ФФФmv,m(,v),Mv12
111222mv,mv,Mv12222
12,mgR,0,mv1B 2
mm5(有AB两小球,质量分别是和,分别固定于两根等长细线的一端,线长为,上lab端分别悬挂于同一水平面上的点o和o',下端两球刚好相互接触。平衡后,将小球A的悬
线拉紧,并拉起至悬线成水平由静止释放。若不记空气阻力,当AB两球发生完全弹性碰撞
后B球上升多高,
1m,4m? ? m,mabab4
12mglmv0,,aa02 mvmvmv,,aab012
111222mvmvmv,,aab012222
B A 1?当m,m时 ab4
2v,2gl25
12,mgh,0,mv bb122
4h,l125
m,4m?当时 ab
8v,2gl25
12,mgh,0,mvbb22 2
64h,l,2l225
?h,2l2
6.某兴趣小组设计了一种实验装置,用来研究碰撞问题,其模型如题25图所示不用完全相同的轻绳将N个大小相同、质量不等的小球并列悬挂于一水平杆、球间有微小间隔,从左到右,球的编号依次为1、2、3……N,球的质量依次递减,每球质量与其相邻左球质量之比为k(k,1.将1号球向左拉起,然后由静止释放,使其与2号球碰撞,2号球再与3号)
球碰撞……所有碰撞皆为无机械能损失的正碰.(不计空气阻力,忽略绳的伸长,
2g取10 m/s)
(1)设与n+1号球碰撞前,n号球的速度为v,求n+1号球碰撞后的速度. n
(2)若N,5,在1号球向左拉高h的情况下,要使5号球碰撞后升高16k(16 h小于绳长)问k值为多少,
7.如图所示,质量为m的由绝缘材料制成的球与质量为M=12m的金恪示并挂悬挂。现将绝缘球拉至与竖直方向成θ=60?的位置自由释放,下摆后在最低点处与金属球发生弹性碰撞。在平衡位置附近存在垂直于纸面的磁场.已知由于磁场的阻尼作用,金属球将于再次碰撞前停在最低点处。求经过几次碰撞后绝缘球偏离竖直方向的最大角度将小于45?.
8.如图14所示,在同一竖直上,质量为2m的小球A静止
在光滑斜面的底部,斜面高度为H=2L。小球受到弹簧的
弹性力作用后,沿斜面向上运动。离开斜面有,达到最高
点时与静止悬挂在此处的小球B发生弹性碰撞,碰撞后球
B刚好能摆到与悬点O同一高度,球A沿水平方向抛射
落在水平面C上的P点,O点的投影O,与P的距离为
L/2。已知球B质量为m,悬绳长L,视两球为质点,重力
加速度为g,不计空气阻力,求:
(1)球B在两球碰撞后一瞬间的速度大小;
(1)球A在两球碰撞后一瞬间的速度大小;
(1)弹簧的弹性力对球A所做的功。
9.(1)如图1所示,ABC为一固定在竖直平面内的光滑轨道,BC段水平,AB段与BC
m段平滑连接。质量为的小球从高位处由静止开始沿轨道下滑,与静止在轨道BC段上h1m质量为的小球发生碰撞,碰撞后两球两球的运动方向处于同一水平线上,且在碰撞过程2mv中无机械能损失。求碰撞后小球的速度大小; 22
(2)碰撞过程中的能量传递规律在屋里学中有着广泛的应用。为了探究这一规律,我
们才用多球依次碰撞、碰撞前后速度在同一直线上、且无机械能损失的恶简化力学模
mmmm、、……m型。如图2所示,在固定光滑水平轨道上,质量分别为、……1231n,nE的若干个球沿直线静止相间排列,给第1个球初能,从而引起各球的依次碰撞。定k1EEnn义其中第个球经过依次碰撞后获得的动能与之比为第1个球对第个球的动kk1k能传递系数 1nka.求 1nmmmmm,,4,,mkb.若为确定的已知量。求为何值时,值最大 1000k21n
10(如图所示,弹簧的一端固定在竖直墙上,质量为m的光滑弧形槽静止在光滑水平面上,底部与水平面平滑连接,一个质量也为m的小球从槽高h处开始自由下滑
A(在以后的运动过程中,小球和槽的动量始终守恒
B(在下滑过程中小球和槽之间的相互作用力始终不做
功
C(被弹簧反弹后,小球和槽都做速率不变的直线运动
D(被弹簧反弹后,小球和槽的机械能守恒,小球能回到槽高h处
11.在光滑的水平面上,质量为m的小球A以速率v向右运动。在小球的前方O点处有一10
质量为m的小球B处于静止状态,如图所示。小球A与小球B发生正碰后小球A、B2
均向右运动。小球B被在Q点处的墙壁弹回后与小球A在P点相遇,PQ,1.5PO。假
设小球间的碰撞及小球与墙壁之间的碰撞都是弹性的,求两小球质量之比m/m。 12
A B
O Q P
.有两个完全相同的小滑块A和B,A沿光滑水平面以速度v0与静止在平面边缘O点的B发生正碰,碰撞中无机械能损失。碰后B运动的轨迹为OD曲线,如图所示。
,t(1)已知滑块质量为m,碰撞时间为,求碰撞过程中A对B平
均冲力的大小。
(2)为了研究物体从光滑抛物线轨道顶端无初速下滑的运动,特
制做一个与B平抛轨道完全相同的光滑轨道,并将该轨道固定在
与OD曲线重合的位置,让A沿该轨道无初速下滑(经分析,A
下滑过程中不会脱离轨道)。
a.分析A沿轨道下滑到任意一点的动量pA与B平抛经过该点的
动量pB的大小关系;
b.在OD曲线上有一M点,O和M两点连线与竖直方向的夹角为45?。求A通过M点时的水平分速度和竖直分速度。
在电场强度为E的匀强电场中,有一条与电场线平行的几何线,如图中虚线所示,几何线上有两个静止的小球A和B(均可看做质点),两小球的质量均为m,A球带电荷量,Q,B球不带电,开始时两球相距L,在电场力的作用下,A球开始沿直线运动,并与B球发生对碰撞,碰撞中A、B两球的总动能无损失,设在各次碰撞过程中,A、B
两球间无电量转移,且不考虑重力及两球间的万有引力,问:
(1)A球经过多长时间与B球发生第一次碰撞,
(2)第一次碰撞后,A、B两球的速度各为多大,
(3)试问在以后A、B两球有再次不断地碰撞的时间吗,如果相等,
请计算该时间间隔T,如果不相等,请说明理由(