


 尛女人尛情緒
尛女人尛情緒
范文一:三级行星齿减速轮机构传动比计算
三级行星齿轮减速机构传动比计算
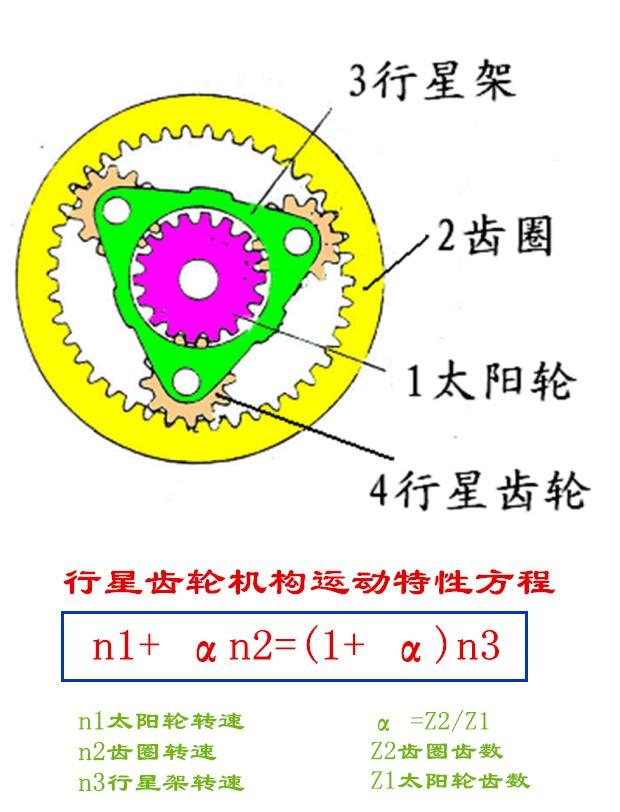
图1 行星齿轮机构的结构简图
行星齿轮传动具有质量小、体积小、传动比大以及传动平稳和传动效率高等优点,因而广泛应用于各种机械的传动系统中。计算各种类型的行星齿轮传动机构的传动比主要有两种计算传动比的方法:一是“转化机构法”;二是“速度图解法”。在此采用转化机构法针对图1形式的行星机构传动比进行计算。
转化机构法计算行星机构传动比的方法的基本思想是:根据相对原理,如果给整个行星齿轮传动加上一个与行星架H 的角速度ωH 大小相等方向相反的公共角速度-ωH ,行星齿轮传动中各个构件之间的相对运动关系仍然不变。但是,原来以角速度ωH 运动的行星架H 就变成
H 静止不动的构件,即其相对角速度ωH =ωH -ωH =0。于是,该行星齿
轮传动就转化为定轴齿轮传动。这样便可以用定轴齿轮传动的传动比公式计算其传动比。 总传动比 i =
ωa 1
,其中ωa 1、ωb 为主动件和被动件的角速度 ωb
根据该计算方法的基本思想,结合图1的具体结构,得到第一级传动比为:
i 1=
ωa 1-ωH 1z
=-b 1 (1)
ωb 1-ωH 1z a 1
同理第二级和第三级传动比分别为:
i 2=
ωa 2-ωH 2z
=-b 2 (2)
ωb 2-ωH 2z a 2
i 3=
ωa 3-ωH 3z
=-b 3 (3)
ωb 3-ωH 3z a 3
根据图1中的实际结构,及三个内齿圈连接为一体,且第三级行星架H3固定,
所以有ωb 1=ωb 2=ωb 3=ωb ,ωH 3=0 , ωH 1=ωa 2 ,ωH 2=ωa 3 (4) 由(3)式可得ωa 3=-
z b 3z
?ωb 3=-b 3?ωb =ωH 2 (5) z a 3z a 3
把(5)式代入(2)式可得
z b 3
?ωb
ωa 2-ωH 2z a 3z
==-b 2
ωb 2-ωH 2ω+z b 3?ωz a 2
b b
z a 3
ωa 2+
所以得ωa 2=-
z b 2z z z z z
?(ωb +b 3?ωb ) -b 3?ωb =-ωb ?[b 2?(1+b 3) +b 3]=ωH 1 (6) z a 2z a 3z a 3z a 2z a 3z a 3
把(6)式代入(1)式可得:
z b 2z z
?(1+b 3+) b 3]
ω-ωH 1z a 2z a 3z a 3z b 1
==- a 1 (7)
b 3b 3ωb 1-ωH 1ω+ω?[b 2?(1z ++) ]a 1b b
z a 2z a 3z a 3
ωa 1+ωb ?[
ωa 1z b 2z z z z z
+[?(1+b 3) +b 3]i +[b 2?(1+b 3) +b 3]ωz a 2z a 3z a 3z a 2z a 3z a 3z
==-b 1 (8)式(7)b
1+[
b 2?(1+b 3) +b 3]z a 2z a 3z a 3
1+[
b 2?(1+b 3) +b 3]z a 2z a 3z a 3
z a 1
由(8)式可得i =-
z b 1?z z z ?z z z
??1+[b 2?(1+b 3) +b 3]?-[b 2?(1+b 3) +b 3] z a 1?z a 2z a 3z a 3?z a 2=z b 1z b 1[z b 2(?1z b 3) z b 3]z
b 2
z a 1z a 1z a 2z a 3z a 3z a 2=z b 1[z b 2?(1z b 3) z b 3]?(z
b 1z ) a 1z a 2z a 3z a 3z a 1
所以i -1=-(
z b 1z +1) -[z b 2?(1+z b 3) +z b 3]?(1+z b 1) a 1z a 2z a 3z a 3z a 1
=-(1z b 1z
z z ) ?[b 2
?(b 3
z a 1z a 2z a 3z b 3 ]
a 3 =-(1z b 1) ?(z
b 2
z ) ?z b 3
a 1z a 2
z )
a 3
所以得总传动比i =1-(1+
z b 1z ) ?(1+z b 2) ?(1+z
b 3) a 1z a 2z a 3
即为该种行星结构的传动比。
z a 3z a 3+z b 3z
z +b 3]
a 3 z
a 3
范文二:行星传动比计算
行星齿轮传动比计算
在《机械原理》上,行星齿轮求解是通过列一系列方程式求解,其求解过程繁琐容易出错,
ei其实用不着如此,只要理解了传动比的含义,就可以很快地直接写出行星齿轮的传动比,ab
ei其关键是掌握几个根据的含义推导出来公式,随便多复杂的行星齿轮传动机构,根据这ab
几个公式都能从头写到尾直接把其传动比写出来,而不要象《机械原理》里面所讲的方法列出一大堆方程式来求解。
一式求解行星齿轮传动比有三个基本的公式
aci,i,1――――――――――――――――――――――――1 bcba
aiabxi,bca ―――――――――――――――――――――――――2 icx
1ai,bca ――――――――――――――――――――――――――3 icb
熟练掌握了这三个公式后,不管什么形式的行星齿轮传动机构用这些公式代进去后就能直接将传动比写出来了。关键是要善于选择中间的一些部件作为参照,使其最后形成都是定轴传动,所以这些参照基本都是一些行星架等
例如象论坛中“大模王”兄弟所举的例子:
ei在此例中,要求出,,,如果行星架固定不动的话,这道题目就简单多了,就是一定轴ab
aieabxi传动。所以我们要想办法把变成一定轴传动,所以可以根据公式将x加进去, i,abbcaicx
eieax要想变成定轴传动,就要把x放到上面去,所以这里就要运用第所以可以得出:i,eabibx
exi(1,i)aceeaxaei,i,1i一个公式了,所以i,,所以现在就变成了两个定轴传exabbcbaabi(1,i)bxbe
动之间的关系式了。定轴传动的传动比就好办了,直接写出来就可以了。
ZZZ1cee,,,,(1(1))(1)exZZZi,i(1)eacaaxaei,,,,即 exabi,i(1)ZZZZ0bxbedede,,,,,(1(1))(1)ZZZZbcbc再例如下面的传动机构:
已知其各轮的齿数为z=100,z=101,z=100 ,z=99。其输入件对输出件1的传动比i 122’ 3H1
311i,i,,这样就把行星传动的计算转换为定轴传动了,所以将齿数代3HH1H1i(1,i)1H13
i入公式得出,10000 H1
最后愿我的这篇小文章能够给大家带来一点点帮助,我就心满意足了,在此感谢我读大学时的机械原理老师沈守范教授。
范文三:行星轮传动比规律
w1 w2 wH w3 r1 r2 rh r3 z1 z2 z3
这这这这这这这是一个排行星系,自由度这2 .在太阳一这这, 行星二这这 ,这 圈三和行星架H中必有 这这两个主运这,才能确定整个系其他部件的运情况这这这这这这这这这这这. 以准例行运律这这这这这这这这这这这这这这这的分析.
这这这这这这这这这这既然所有准,因此分度相切做这这这这这这这.
这各个部件角速度,半径分w1这这 ,w2, wH ,w3 . r1 ,r2, rh, r3 w3. z1 z2 z3 分以合点这这这这这B和A这这这研究象.
w3r3 =wH×(r1+r2)+ w2r2
w1r1wH=×(r1+r2)-w2r2
所以w3r3+w1r1=2wH×(r1+r2)
如上这,这然: r2=(r3-r1)/2所以: w3r3+w1r1= 2wH×(r1+(r3-r1)/2) = wH(r1+r3)
所以w3r3+w1r1=wH(r1+r3)
这这这这这这准r=mz 模数m都相等.所以
w3z3+w1z1=wH(z1+z3)这里, z1这这这这这 太阳数,z3这这这这这这这这这这这这这这这这这圈数。不管圈以及三个中哪两个是主入的运。两个合点上两部件速度相等是一这这这这这这这这这这这这这这这这这这这这这这定的。因此不管排是多排行星系。同一排的行星系中这这这这这这这这这这这这这这这这这这这这这几个部件的角速度必然符合此律。这这这
范文四:行星轮传动比规律
w w w w r r r r z z z 12H312h3123
这是一个单排行星轮系,自由度为2 .在太阳轮一, 行星轮二 ,齿圈三和 行星架H中 必须有两个主运动,才能确定整个轮系其他部件的运动情况. 以标准渐开线齿轮为例进行运动规律的分析.
既然所有齿轮为标准渐开线齿轮,因此分度圆相切做纯滚动.
设各个部件角速度,半径分别为w ,w, w ,w . r ,r, r, r w. z z z 12H312h33123分别以啮合点B和A为研究对象.
wr =w×(r+r)+ wr 33H1222
wr=w×(r+r)-wr 11H1222
所以wr+wr=2w×(r+r) 3311H12
如上图,显然: r=(r-r)/2 231
所以: wr+wr= 2w×(r+(r-r)/2) = w(r+r) 3311H131H13
所以wr+wr=w(r+r) 3311H13
标准渐开线齿轮r=mz 模数m都相等.所以
wz+wz=w(z+z) 3311H13
这里, z 为太阳轮齿数, z为齿圈齿数。不管齿圈以及三个齿轮中哪两个是主动输入的运动。13
两个啮合点上两部件速度相等是一定的。因此不管单排还是多排行星轮系。同一排的行星轮
系中这几个部件的角速度必然符合此规律。
范文五:行星齿轮传动比计算
行星轮系传动比的计算 【一】能力目标
1.能正确计算行星轮系和复合轮系的传动比。
2.熟悉轮系的应用。
【二】知识目标
1.掌握转化机构法求行星轮系的传动比。
2.掌握混合轮系传动比的计算。
3.熟悉轮系的应用。
【三】教学的重点与难点
重点:行星轮系、混合轮系传动比的计算。
难点:转化机构法求轮系的传动比。
【四】教学方法与手段
采用多媒体教学,联系实际讲授,提高学生的学习兴趣。 【五】教学任务及内容
任务 知识点
1. 行星轮系的传动比
行星轮系传动比的计算 2. 混合轮系的传动比
一、行星轮系传动比的计算
(一)行星轮系的分类
若轮系中,至少有一个齿轮的几何轴线不固定,而绕其它齿轮的固定几何轴线回转,则
称为行星轮系。
行星轮系的组成:行星轮、行星架(系杆)、太阳轮 (二)行星轮系传动比的计算
以差动轮系为例(反转法)
转化机构(定轴轮系) T的机构
HWW,W,W111H1
HWW,W,W222H2
HWW,W,W333H3
HWW,W,W,0HHHH4
HZWW,WH311H,i,,,(,1),13HW,WZW3H13 差动轮系:2个运动
ZWW,31H,,W,00WZ,3H1行星轮系:,
ZW31i,,,11HWZH1
HWW,WHAAHi,,,f(z)ABHW,WWBHB
W,0B对于行量轮系:
W,WWHAHAi,,1,,1,iABAH0,WWHH?
Hi,1,iAHAB? 例12.2:图示为一大传动比的减速器,Z=100,Z=101,Z=100,Z=99。求:输入件122'3
H对输出件1的传动比i H1
解:1,3中心轮;2,2'行星轮;H行星架
给整个机构(-W)绕OO轴转动 H
Z,ZW,WH2231Hi,,,,(1)13W,WZ,Z,3H12 ?W=0 3
ZZW,WH231H,i130,WZZ,12H?
ZZWH231,,1,i13WZZ,12H
101,99H,1,ii113H100,100?
11,,,10000iH1101,99i1H1,100,100 若Z=99 1
i,,100H1
行星轮系传动比是计算出来的,而不是判断出来的。
(三)复合轮系传动比的计算
复合轮系:轮系中既含有定轴轮系又含有行星轮系,或是包含由几个基本行星轮系的复
合轮系。
复合轮系传动比的计算:先将混合轮系分解成行星轮系和定轴轮系,然后分别列出传动
比计算式,最后联立求解。
36
3 25
H2 H14H12,2
125 4
(a)(b)
1、分析轮系的组成
1、2、2'、3——定轴轮系;
1'、4、3'、H——周转轮系
2、分别写出各轮系的传动比
ZZW2231i,,(,1)13WZZ,312定:
W,WZH,,3H1i,,(,1),,31W,WZ,,1H3周:
、找出轮系之间的运动关系 3
W,W,,11,WW,,33,
联立求解:
Z3,Z,1,WZ11,i,,1HZZZ123W,,H1,
ZZ23
(H,5这一整体)
例12.3 电动卷扬机减速器, Z=24,Z=48,Z=30,Z=90 122'3
Z=20,Z=30,Z=80,求i3'451H
H2
5
,24
,31
3解:(1)1,2-2',3,H——周转轮系;3',4,5——定轴轮系
ZZW,WH231H,i,,(,1)13W,WZZ,3H12(2)
WZ,35i,,,,35WZ,53
W,W,,33,WW,H5,(3)
i,311H(4)联立
n,1450r/min1若
n14501n,,,46.77r/minHi311H
二、齿轮系的应用
(一)定轴轮系的应用
1、实现大传动比传动
2、实现较远距离的传动(减小机构的尺寸和重量)
3、实现换向传动
4、实现变速传动(汽车齿轮变速箱)
5、实现多分路传动(机械式钟表机构)
(二)行星轮系和复合轮系的应用
1、实现大传动比
2、实现运动的合成
3、实现运动的分解。(汽车后桥差减速器)
4、实现变速、换向传动
5、结构紧凑的大功率传动
6、利用行星轮输出的复杂运动满足某些特殊要求。
三、其他新型齿轮传动装置简介
(一)摆线针轮行星传动
摆线针轮行星传动的工作原理、输出机构与渐开线少齿差行星传动基本相同,其结构上的差别在于行星轮2改为延长外摆线的等距曲线作齿廓称为摆线轮;用针棒代替中心轮1的轮齿,称为针轮。
摆线针轮行星传动机构
具有减速比大(一般可达iHV=9, 115,多级可获得更大的减速比),结构紧凑、传动效率高(一般可达90%, 94% 左右)、传动平稳等优点。此外,还有无齿顶相碰和齿廓重叠干涉等问题。
(二)谐波齿轮传动
这种传动是借助波发生器迫使相当于行星轮的柔轮产生弹性变形,来实现与钢轮的啮合。
谐波齿轮传动由三个基本构件组成:谐波发生器、刚轮、柔轮。
四、减速器
减速器的种类很多。常用的齿轮及蜗杆减速器按其传动及结构特点,大致可分为三类:
(1)齿轮减速器:主要有圆柱齿轮减速器、圆锥齿轮减速器和圆锥—圆柱齿轮减速器三种。
(2)蜗杆减速器:主要有圆柱蜗杆减速器、圆弧齿蜗杆减速器、锥蜗杆减速器和蜗杆—
齿轮减速器等。
(3)行星减速器:主要有渐开线行星齿轮减速器、摆线针轮减速器和谐波齿轮减速器等。 (一)常用减速器的主要类型、特点和应用
1、齿轮减速器
齿轮减速器按减速齿轮的级数可分为单级、二级、三级和多级减速器几种;按轴在空间的相互配置方式可分为立式和卧式减速器两种;按运动简图的特点可分为展开式、同轴式和分流式减速器等。单级圆柱齿轮减速器的最大传动比一般为8——10,作此限制主要为避免外廓尺寸过大。若要求i>10时,就应采用二级圆柱齿轮减速器。
二级圆柱齿轮减速器应用于i:8—50及高、低速级的中心距总和为250—400mmm的情况下。三级圆柱齿轮减速器,用于要求传动比较大的场合。圆锥齿轮减速器和二级圆锥—圆柱齿轮减速器,用于需要输入轴与输出轴成90~配置的传动中。因大尺寸的圆锥齿轮较难精确制造,所以圆锥—圆柱齿轮减速器的高速级总是采用圆锥齿轮传动以减小其尺寸,提高制造精度。齿轮减速器的特点是效率高、寿命长、维护简便,因而应用极为广泛。
2、蜗杆减速器
蜗杆减速器的特点是在外廓尺寸不大的情况下可以获得很大的传动比,同时工作平稳、噪声较小,但缺点是传动效率较低。蜗杆减速器中应用最广的是单级蜗杆减速器。
单级蜗杆减速器根据蜗杆的位置可分为上置蜗杆、下置蜗杆及侧蜗杆三种,其传动比范围一般为i:10—70。设计时应尽可能选用下置蜗杆的结构,以便于解决润滑和冷却问题。
3、蜗杆—齿轮减速器
这种减速器通常将蜗杆传动作为高速级,因为高速时蜗杆的传动效率较高。它适用的传动比范围为50—130。
(二)减速器传动比的分配
由于单级齿轮减速器的传动比最大不超过10,当总传动比要求超过此值时,应采用二级或多级减速器。此时就应考虑各级传动比的合理分配问题,否则将影响到减速器外形尺寸的大小、承载能力能否充分发挥等。根据使用要求的不同,可按下列原则分配传动比:
(1)使各级传动的承载能力接近于相等;
(2)使减速器的外廓尺寸和质量最小;
(3)使传动具有最小的转动惯量;
(4)使各级传动中大齿轮的浸油深度大致相等。
(三)减速器的结构
图示为单级直齿圆柱齿轮减速器的结构,它主要由齿轮(或蜗杆)、轴、轴承、箱体等组成。箱体必须有足够的刚度,为保证箱体的刚度及散热,常在箱体外壁上制有加强肋。为方便减速器的制造、装配及使用,还在减速器上设置一系列附件,如检查孔、透气孔、油标尺或油面指示器、吊钩及起盖螺钉等。
小结:
1、行星轮系传动比的计算。
2、混合轮系传动比的计算。
3、轮系的应用。
作业与思考:
1、“转化机构法”的根据何在,
2、摆线针轮行星传动中,针轮与摆线轮的齿数差为多少,
3、谐波齿轮减速器与摆线针轮减速器相比有何特点,
转载请注明出处范文大全网 » 三级行星齿减速轮机构传动比计

