


 王小明叫我哥
王小明叫我哥
nbu-eied.net
Privacy Policydomain owner directly (contact information can be found in whois). relationship with the advertisers. In case of trademark issues please contact the party. Neither the service provider nor the domain owner maintain any The Sponsored Listings displayed above are served automatically by a third 2012 Copyright. All Rights Reserved.
5-4 已知系统开环传递函数为 5-5 已知系统开环传递函数为
习 题
245-1 某系统的传递函数为,当输入为时,试求其稳态输出。 r(t),Asin(t,45:)03s,235-2 设系统结构图如题5-2图所示,试
作用下,系统的稳态误r(t),sin(t,30:),cos(2t,45:)
e(t)差。 ss题5-2图 制系
5-3 典型二阶系统的开环传递
2,n G(s),s(s,2,,)n
c(t),2sin(t,45:),当时,系统的输出为,试确定系统参
5-4 已知系统开环传递
K(s,1),G(s),, (、、 KTk2s(Ts,1)
,,试分析并绘制,和,情况下的概略开环相特性
5-5 已知系统开环传递
10G(s), k2s(2s,1)(s,0.5s,1)
试概略绘制开环幅相特性
5-6
2G(s),(1) (2s,1)(8s,1)
s8(,1)0.1(2) G(s),s2s(s,s,1)(,1)2
200G(s),(3) 2s(s,1)(10s,1)
100G(s),(4) 2s(s,s,1)(6s,1)
T5-7 已知下列系统开环传递函数(参数、、,,,=1,2,…,6) KTii
KG(s),(1) (Ts,1)(Ts,1)(Ts,1)123
K(2) G(s), s(Ts,1)(Ts,1)12
K(3) G(s), 2s(Ts,1)
K(Ts,1)1(4) G(s),2s(Ts,1)2
K(5) G(s), 3s
K(Ts,1)(Ts,1)12G(s),(6) 3s
K(Ts,1)(Ts,1)56G(s),(7) s(Ts,1)(Ts,1)(Ts,1)(Ts,1)1234
K(8) G(s), Ts,1
,K(9) G(s), ,Ts,1
KG(s),(10) s(Ts,1)
其系统环幅相曲线分别如题5-7图(1),(10)所示。试根据奈氏判判定各系统的闭
s环不稳定,确定其
题5-7图 系统开环幅相
5-8 若单位反馈系统的开环传
,0.8sKeG(s), s,1
试确定使系统稳定
5-9 设单位反馈系统的开传递
2,,s5se G(s),4(s,1)
,试确定闭环系统稳定时,延迟间的
5-10 设单位反馈控制系统的环传
as,1 G(s),2s
a试确定相角裕度为45?
,,3,5-11 对于典型二阶系统,已知参数rad/s,,试确定截止
t,35-12 对于典型二阶系统,已知,,,试计算相角裕。 ,,%,15%s5-13 求题5-6 5-14 已知单位负反馈系统的开环频率性如题5-14图
(1) 写出开环传递函
,,,(2) 确定,及数值; 312
,,(3) 求出闭环系统和
(a) (b) 题5-14图 开环频率特性
(a)极坐标图; (b)Bode图
,,s5e,G(s),5-15 已知系统的开环传递为,试用对数频率特性法确
范围。
5-16 某控制系统的结构图如题5-16图所示,试确定该统的相角裕
C(s) 20(s,1)R(s) 2s(s,5)(s,2s,10)
5-16图 控制系统结构图 5-17 已知单位馈系统的开
48(s,1)G(s), s(8s,1)(0.05s,1)
t,试按和之值估算系统的时域指标
5-18 已知单位反馈系统的环传
题5-19图
14G(s), s(0.1s,1)
,,求开环频率特性的、值以及闭环频率特的、值,并分别用两组征量计算出系
t指标和。 ,%s
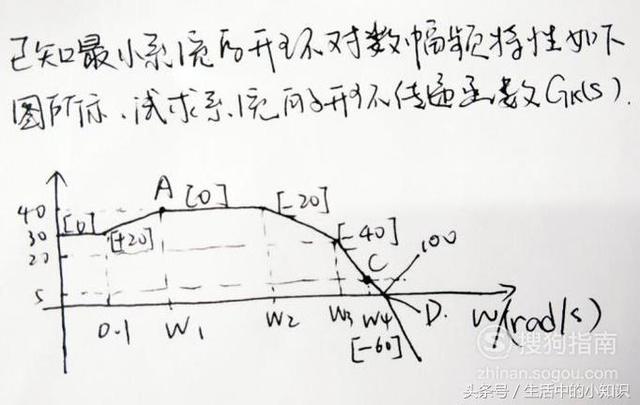
5-19 设最小相位系统的开环对数幅频特性分线近似表示如题5-19图所示。试写
已知单位反馈系统的开环传递函数为
1. 已知单位反馈系统的开传递
⑴. 用R outh稳定判判别使闭环系
⑵. 求出闭环系统的
⑶. 绘制α从0→∞时的闭环系统
① 系统的阶跃响应过阻尼时, α取值范围(暂考虑闭环
② 闭环导极点ζ=0.707时的闭环极点及阶跃响应σ%、 (暂不考虑零点的影响) 。 ③ 简要回答考闭环零点影响后阶跃响应生的变化。(此
2.单位反馈的典型欠阻尼二阶系统, 校正前其闭环相频率特
⑴. 求校正前系统的开环截止频率、相角裕度、动态能指标及
⑵. 采用串联校正装置:,求校正后系统开环频率, 相角裕度及相
3. 一非线性系统的结构如图2所示,其中非线节的参数K =1,a =0.5。设原
1) 试在相平面上绘出输入时,R0>0,
2) 试在相平面上绘出输入时,V0>0,
3) 说明死区非线性特性引入对系输入响应动态性的影响。(
4. 图3所示的离散系统中,采样周期 =0.2秒,放大系数K=1,试⑴系统的开环冲递函数G(z)、闭环脉冲传递函数Φ(z);⑵判断系统的稳定性; ⑶。(
5.系统动方程为:,要求:(1)写出系统的能控标准型并绘出其相应模拟结图;(2)写系的能观标准型并绘出其相应的模结构图;(3)写出系统的对角线标准型,并绘出应的模拟结构图。(
6.已系统状态空间表达式为。求:(1)利用李雅普诺夫第二方法判断该系统平衡状态的稳定性;(2) 系统输入 ,求统状方程的解; (3)对该系统进行精确离散,并判断离散化系能控能观性和画出离散化后系统的模拟结构
??
??
??
??
第 2 页
433
华南理工大学
2007年攻读硕士学位研究入学
(试卷上做答无效,请在答题纸做答,试后本卷须与答题
科目名称: 自控基
适用业: 控制理论与控制工程 交通信息工程及控制 控制理与控制程 系统析集成 控制理论与控制工程 检测技术自动化装置 系统工程
第 1 页
已知单位反馈系统的开环传递函数为
433
华南理工大学
2007年攻读硕士学位研究生学考
(试上做答无效,请在答题纸上做答,试后本
适用专业: 控制理论与控制工程 交通信息工程及控制 控理论与制工程 分析与集成 控制理论与控制工程 测技术与自动化装置 系统程 模式识别与
共 页
s,aG(s),1( 已知单位反馈系
?. 用R,,,,稳定判据别使闭环系统定的α取
?. 求出闭环系统的零点;
?. 绘制α从0??时的闭环系统根轨
? 系统的阶跃响应过阻尼时,α取范围(暂不考虑环零点的影
t? 闭环主导极点ζ=0.707的闭环极点及阶跃
环零点的影响)。
? 简回答考虑闭环零点影响后阶跃响应发生的变化。(此31 分) 2(单位反馈的典型欠阻尼二系统,校正前其闭环幅频率特性如图1
,,%、t,?. 求校正前系统的环截止频率、相角度、动态性
环传递函数;
0.4s,1'G(s),?. 若采用串联校正:,求校正后系统开
''',相角裕度及相应的动态性
第 1 页
3. 一非线性系统的结构如图2所示,其中非环节的参数K,1,a,0.5。设原系
,,,,,rt,R,1te,e1) 试相平面上绘出输入时,R>0,的相
,,,,,rt,Vt,1te,e2) 在相平面上绘出输入,V>0,
3) 说明死区非线性特性引入对系统入响应动态性能的影
T4. 如图3所示的离散系统中,采样期 =0.2秒,放
开环脉冲传递函数G(z)、闭环脉传递函数Φ(z);?判断系
nr(t),1(t)时,c(nT),,z/z,a。(此题16 )(附的Z变
,,,,5(设系统运动方程为:y,7y,10y,u,10u,要求:(1)写出系统的控标准并绘出其相应的结图;(2)写出系统的能观标准型并绘其相应的模拟结构;(3)写出系统的对角线标准型,并绘相应的模拟结构图。(此
,100,,,,,,,y,11xx,x,u,6(
利用雅普诺夫第二方法判断该系统平衡
(0)x0,,,,1,,求系统的状态方程的解;(3)对该系统进行精确离散化,并判断离,,,,x(0)1,,,,2
散化系统的能控能观性和画出离散化后系统模拟结构图。此时,采
第 2 页
第 3 页
taohuaupload_已知单位反馈系统的开环传递函数为
1 绪论
(1) 控
被控对象
控制系统 测量元件
比较元件
控制装置 放大元件
执行机构
校正装置
给定元件
(2) 由系统工
(3) 对控
(4) 控
(5)
将系统的输出信号引回输入,输入信号相比较,利用得的偏差信号行控制,达到减小偏差、消除偏差的目
2 数学模型
时域:微分方程,
,
复域:传递函数,
,频域:频率特性,
2-1 试建立图2-27所示各系统的微分程。其中外
m移为输出量;(弹性数),(阻尼
解
m(a)以平衡状态为基,对质块进行受力析(不再考
所示。根据牛
2dydyF(t),ky(t),f,m 2dtdt
整理得
2dy(t)fdy(t)k1,,y(t),F(t) 2dtmdtmm
(b)如图解2-1(b)所示,取A,B两点分别进行受力分析。对A点
dxdy1 kx,x,f, (1) ()()11dtdt
对B点有
dxdy1 (2) f(,),ky2dtdt
联立式(1)、(2)可得:
kkkdydx121 ,y,
dtf(k,k)k,kdt1212
2.1 拉氏变
,,Laf(t),bf(t),aF(s),bF(s) (1)线性性质: 1212
,,,,,,,,,Lft,s,Fs,f0 (2)微分定理:
,,Lcos,t, 例:求
,11s,,,?cost,Lsint,,s,,,, 解: 2222,,s,,s,,
11,,-1,,,,,,,,(3)积分
1,,,,,,Lftdt,,Fs零初始条件下有: ,s
, 例:求L[t]=?
,,?t,1tdt 解: ,
1111 ?Lt,L,,1tdt,,,t, ,,,,2,t,0ssss
2,,t, 例:求 L,,2,,
2t?,tdt 解: ,2
22,,t111t1 ?L,L,,tdt,,,,,,,23,2sss2s,,,t0
(4)位移定理
,,s,,,,,,Lft-,,e,Fs 实位移定理:
0 t,0,
,,,,, ft,1 0, t,1 求Fs, 例: ,
,0 t,0,
解:f(t),1(t),1(t,1)
111,s,s ,,,,?Fs,,,e,1,e
sss
at,,,,,,Le,ft,Fs-a虚位移定理: (证略)
at,,Le, 例:求
1atat L,,e,L,,1t,e,解:,, s,a
(5)终值定理(
,,,,,, limft,f,,lims,Fst,,s,0
1,,Fs, , 例: 求 f,,,,,,,ss,as,b
11f,,lims,,, 解: s,0,,,,ssasbab,,
s,2F(s),f(t),?例: 求 2s,4s,3
s,2cc12F(s),,,解: (s,1)(s,3)s,1s,3
s2121,,,clim(s1) ,,,,1s,,1(s1)(s3)132,,,,
s2321,,,clim(s3) ,,,,2s,,3(s1)(s3)312,,,,
1212?F(s),, s,1s,3
11,t,3t ?f(t),e,e22
ccs,3s,312? 例: F(s),,,,2(s,1-j)(s,1,j)s,1-js,1,js,2s,2
解1:
s32j,,clim(s1-j),,, 1s,,1,j(s1-j)(s1j)2j,,,
s,32-jc,lim(s,1,j), 2s,,1-j(s,1-j)(s,1,j),2j
2,j2-j(,1,j)t(,1,j)t?f(t),e,e 2j2j
jt,jtjt,jt1e,ee,e,tjt-jt,,?,sint,,cost,e(2,j)e,(2,j)e () 2j2j2j
1,t,t,,,e2cost,4sintj,e(cost,2sint) 2j
s,3s,1,2s,12?F(s),,,, 2222(s,1),1(s,1),1(s,1),1(s,1),1
虚位移定理,t,t ?f(t),cost.e,2sint.e
解2:
s,3s,1,2s,11F(s),,,,222222222 (s,1),1(s,1),1(s,1),1(s,1),1
,t,tf(t),e.cost,2e.sint (复位移定
s,2?例 F(s), 求 f(t),?2s(s,1)(s,3)
cccc2134F(s),,,,解: 2(s,1)s,1ss,3IVs2121,,,2clim(s1),,,,, 22,,s1s(s1)(s3)(1)(13)2,,,,,IV,,ds2s(s3)(s2)[(s3)s]3,,,,,,2 clim(s1)lim,,,,,1,,222,,s,,s11ds4s(s1)(s3)s(s3),,,,,
s22,clims.,, 32,s0s(s1)(s3)3,,
s21,c,lim(s,3)., 42s,-3s(s1)(s3)12,,
11312111?F(s),,.,.,.,. 22(s,1)4s,13s12s,3
1321,t,t,3t ?f(t),,te,e,,e24312
Cs(), 例.化简
3 时域
2,1nG(s),,222 ms,Bs,ks,2s,,,,nn
k
,,n m
B
,, 2mk
常见的性能指标有:上升时间tr、峰值时间tp、调整时间ts、
最大超调量Mp、振荡次数N。
c(t)
允许误差
M
1 p
0.9
,,=0.05或0.02
0.1
t t t 0 rpst
欠阻尼二阶系统
2t,,,n,1,e,21,,c(t),1,sin(1,t,tg),t,0n 2,,1,
上升时间
2,1,,,arctg,,,,arccos,,tr 22,1,,,1,,nn
峰值时间
,
,tp 2,1,,n
最大超调量
(ct),(c,)p
M,,100%p
(c,)
2 ,,,1,,,e,100%
调整时间ts
4,,,,0.02,,,,,ln,,ln1,2,n,,,ts3,, ,,,,0.05n,,,,n
已知系统
2s,1
G(s), 2(s,1)
求系统的单位阶跃响
解:1)单位
2s,1111 C(s),G(s)R(s),,,,22ss,1s(s,1)(s,1)
,t,tc(t),L[C(s)],1,te,e
2) 单位脉
d
,(t),[1(t)]
dt
d,t,tc(t),c(t),2e,te
dt
3.1
单位反馈系统的
25 G(s), s(s,5)
2er(t),1,2t,0.5t
K,525,G(s),解1 ,s(s,5)v,1,
25K,limG(s),lim,, ps,0s,0s(s5),
25KsGs ,lim(),lim,5vs,0s,0s,5
s252KsGs ,lim(),lim,0as,0s,0s,5
1,,0er(t),1(t) 时, 1ss11,Kp
A2,,,0.4r(t),2t 时, e 22ssK5v
A12r(t),0.5t,,,,e时, 3ss30Ka
e,e,e,e,,
解2:
111代入 R(s),,2,,0.523sss
3.2
已知单位反馈系统
7(s,1) G(s), 2s(s,4)(s,2s,2)
2试分别求出当输信号和时系统
[]。 e(t),r(t),c(t)
K,78,7(s,1)解 1: G(s), ,2s(s,4)(s,2s,2)v,1,由静态误差系数
e,0时, r(t),1(t)ss
A8r(t),t时, e,,,1.14ssK7
2r(t),te,,时, ss
解2:
sR(s)
e,lime(t),limsE(s),lim ss
t,,s,0s,01,G(s)H(s)
111 R(s)分
代入计算
C(s) R(s) E (s)
G(s)
,
B(s)
H(s)
E(s)1
,
R(s)1,G(s)H(s)
,
闭环传递函数 R(s)1,G(s)H(s)
B(s)
开环传递函数 ,G(s)H(s)
E(s)
稳态误差
sR(s) e,lime(t),limsE(s),lim ss
t,,s,0s,01,G(s)H(s)
静态位置误差即单位跃输入下的稳态误
1
R(s), s
sR(s)1e,lim,limss s,0s,01,G(s)H(s)1,G(s)H(s)静态速度误差即单位速度输入下的稳态误
1 R(s),21ss,2sR(s)1selimlimlim,,,sss,0s,0s,01G(s)H(s)1G(s)H(s)sG(s)H(s),,
静态加速度误差即单位速度输入下的稳态误
1 R(s),31ss,3sR(s)1selimlimlim,,,ss2s,s,s,1G(s)H(s)1G(s)H(s)000sG(s)H(s),,
静态位置误差系数 K,G(s)H(s),G(0)H(0)plim s,0静态速
2静态加速度误差
3.3
某典型二阶系统的单阶跃响应如图
图
解 依题,系统闭
2K,.nG(s), 22s,2,,s,,nn由阶跃响应曲线有:
1h(,),limsG(s)R(s),lims,(s),,K,2 s,0s,0s
,,,,t2p,2,,1,,n,
2 ,2.52,,,,1,,o,,,Me25po,,2
,0.404,,
,联立求解得 ,1.717,n,
22,1.7175.9G(s),,
3.4
t如图所示系统,假设该系统位阶跃响应中的超调量M=25%,峰
解: 系统结构图
Y(s)KKG(s),,, B2X(s)s(s,1),K,(s,1)s,(1,K,)s,K
2,n与二阶系统传函数标准形式
,,2,1n2 ,,,,,KK,;2,1,或,nn2,n
,,,21,, M,e,100%,25%0
,,,21,,e,0.25
两边取自
,,,,ln0.25,,1.3863 2,1,
1.3863,,,0.4 22,,1.3863
依据给定的
,t,,0.5 (秒) p2,,1,n
,,所以 (弧度/秒) ,,6.85n2,0.51,故可
2K,,,46.95,47 n
τ?0.1
4 稳定性
转载请注明出处范文大全网 » 已知反馈系统的开环传递函数为

